Tipus de màquines rotatives de corrent altern i documentació
De màquines elèctriques rotatives de corrent altern, n’hi ha dues grans categories:
- Màquines síncrones
- Màquines asíncrones
Tots dos tipus es poden fer servir tant com a motors com a alternadors, però les síncrones són més aplicades com a alternadors.
Un capítol apart mereixen les màquines monofàsiques, en concret funcionant com a motors, doncs n’existeixen molts tipus diferents, amb característiques de funcionament molt concretes, fruit de les molt diverses aplicacions que tenen.
D’una altra banda, la documentació tècnica relativa a màquines rotatives de corrent altern pot ser molt diversa:
- Documentació tècnica sobre la fabricació (processos, dissenys, etc.)
- Documentació tècnica sobre la instal·lació (esquemes, simbologia, etc.)
- Documentació tècnica sobre manteniment i seguretat
Màquines síncrones
De màquines síncrones tenim alternadors i motors, i aquestes màquines són més utilitzades com a alternadors.
Les característiques diferencials són:
- Velocitat polar de l’estator igual que la velocitat de gir del rotor, de sincronisme.
- Velocitat constant en el seu funcionament.
- Regulació pel bobinatge de camp o excitació.
Alternador síncron
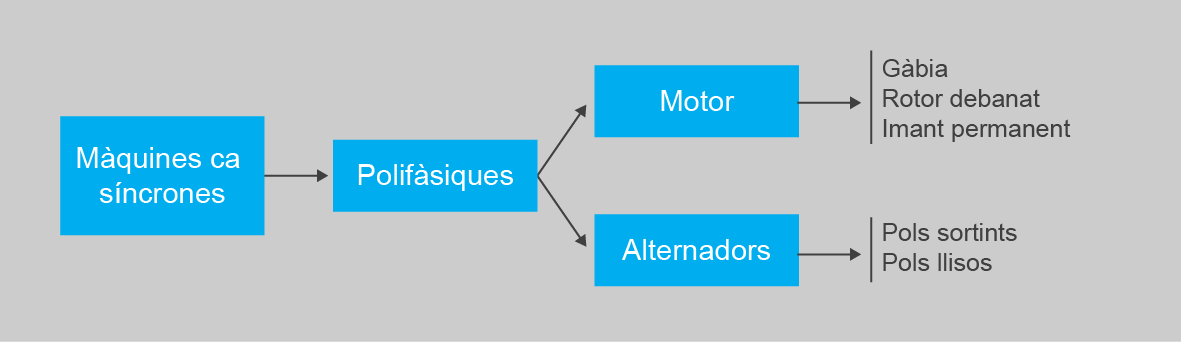
Les màquines síncrones trifàsiques es classifiquen bàsicament segons la figura.
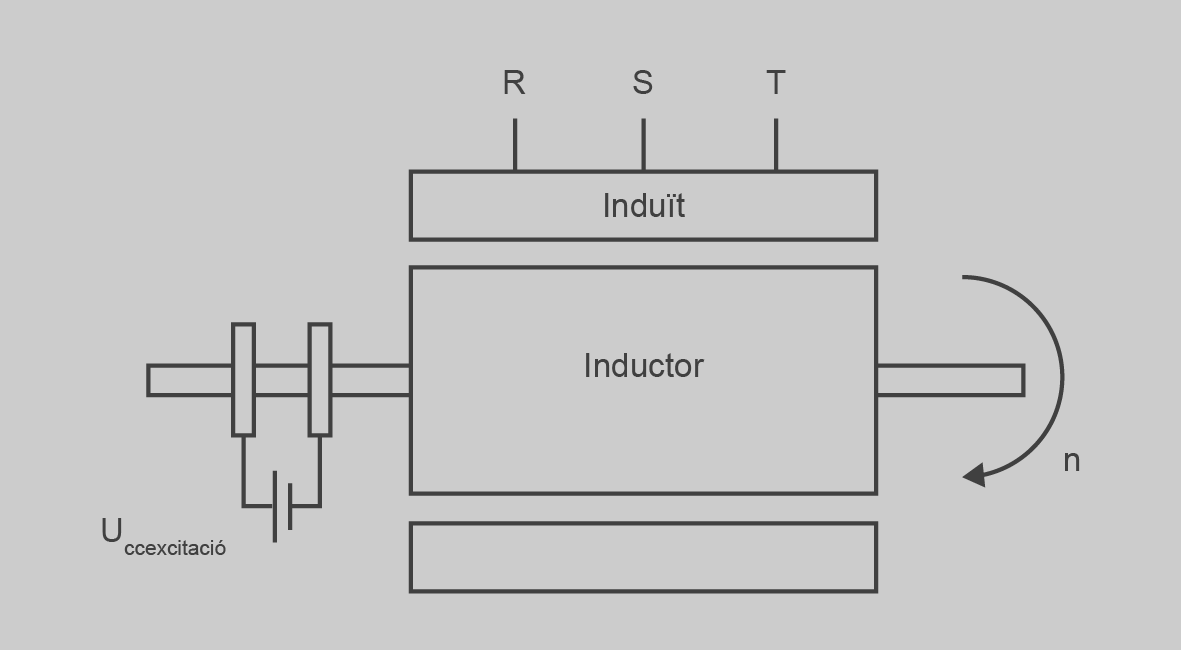
L’induït normalment és trifàsic i se sol col·locar en l’estator (en màquines de petita potència, menor que 10 kW, de vegades se situa l’inductor en l’estator i l’induït en el rotor, i llavors hi ha tres anells en el rotor) com a la figura.
Les grans centrals generadores, per tal de controlar la tensió de sortida, munten grups excitadors, com a sistema d’excitació de grups generadors per l’acoblament amb turbines de gas, vapor i hidroturbines. Aquests sistemes d’excitació consten, tradicionalment, d’una dinamo excitatriu en derivació muntada en l’eix del grup, i la seva sortida s’aplica al rotor de l’alternador per mitjà d’uns anells lliscants amb les seves escombretes respectives. L’excitatriu és un generador de CC convencional, en el qual de vegades se substitueix tota o part de la seva excitació per una excitatriu pilot amb l’objectiu de millorar la rapidesa de resposta. En la figura es mostren les excitatrius pilot i principal.
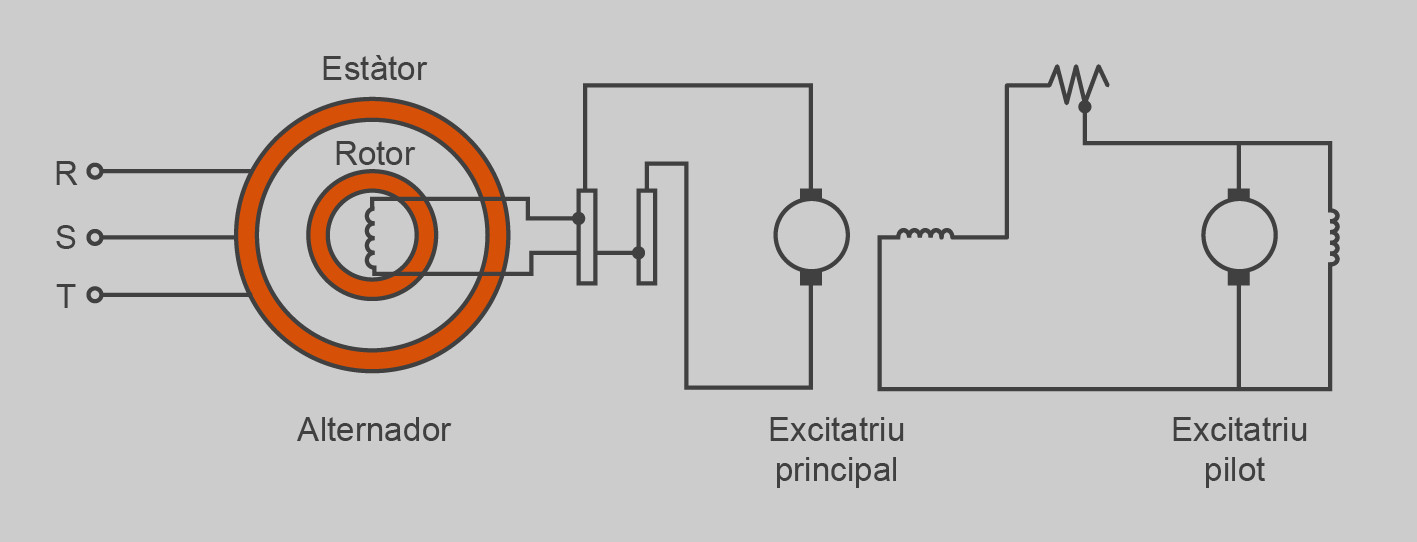
Les màquines síncrones més petites no solen tenir excitatriu pilot i l’excitatriu principal treballa en mode derivació alimentada directament de l’inductor o el camp de l’alternador.
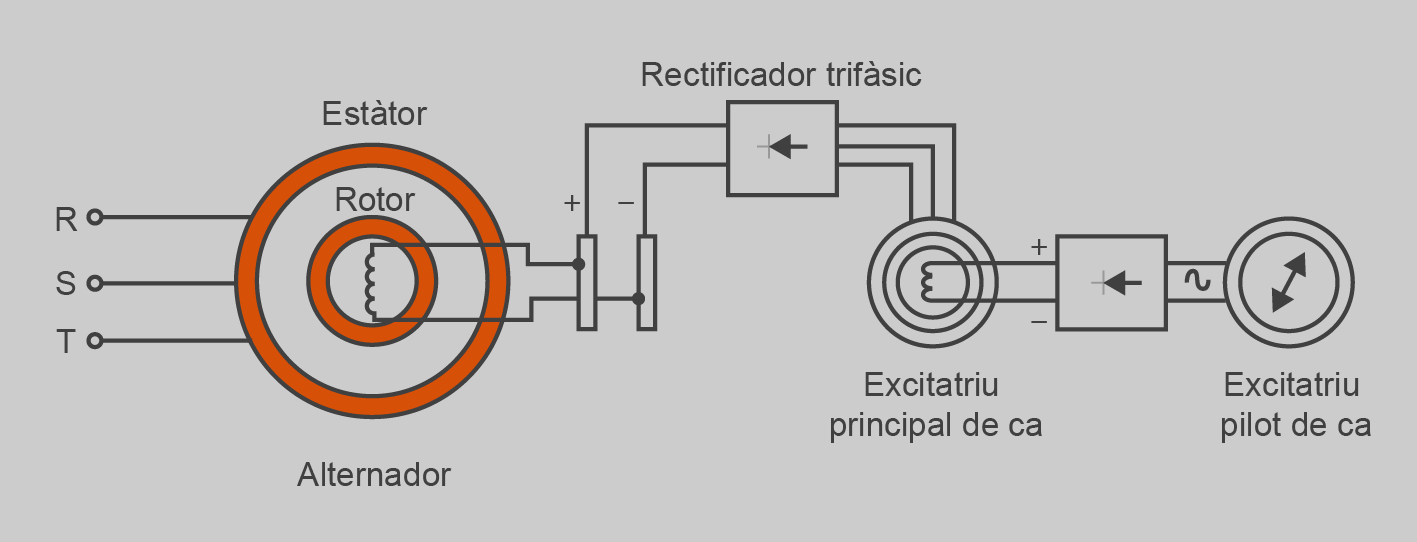
Actualment la regulació de la tensió és electrònica, amb rectificadors controlats de silici que obtenen una amplitud variable de corrent continu segons la figura.
Per al subministrament de l’energia elèctrica a instal·lacions aïllades, s’utilitzen grups electrògens, en què els seus alternadors utilitzen l’autoexcitació, aprofiten la tensió dels pols de la pròpia sortida del generador i la rectifiquen a corrent continu. El magnetisme restant existent en els pols de la màquina generadora encebarà la màquina. Estem parlant d’un sistema realimentat que permet estabilitzar la tensió de sortida de la màquina, encara que aquesta treballi amb càrregues variables, cosa que dóna una gran autonomia i seguretat al seu servei.
Principi de funcionament de l'alternador síncron
A les màquines síncrones el rotor actua com un electroimant, i un flux de CC ha d’alimentar el circuit de camp del rotor. Aquest corrent, anomenat d’excitació, es pot subministrar per una font muntada directament al rotor o per una font externa que el subministri amb escombretes i anells fregants; la font externa s’utilitza en les màquines petites.
Per a una excitació constant la màquina síncrona es mou a velocitat estrictament constant. La freqüència de la càrrega coincideix amb la freqüència de l’induït i és directament proporcional a la velocitat de gir del rotor. És important que la turbina o motor primari que l’arrossega treballi a velocitat constant, i pugui fer el servei de generador de tensió a freqüència constant.
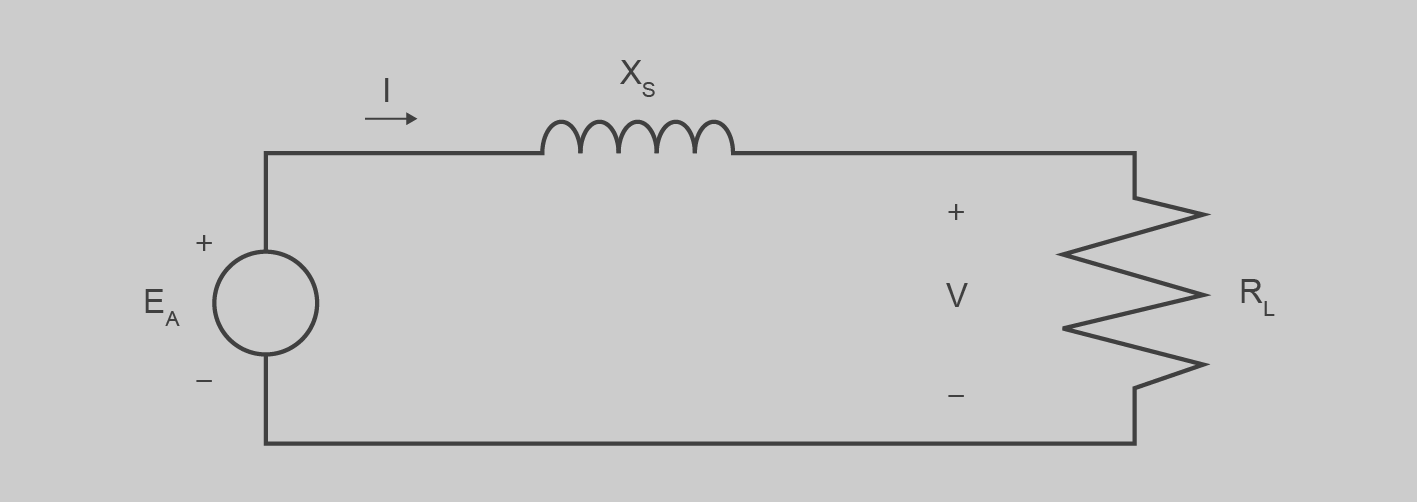
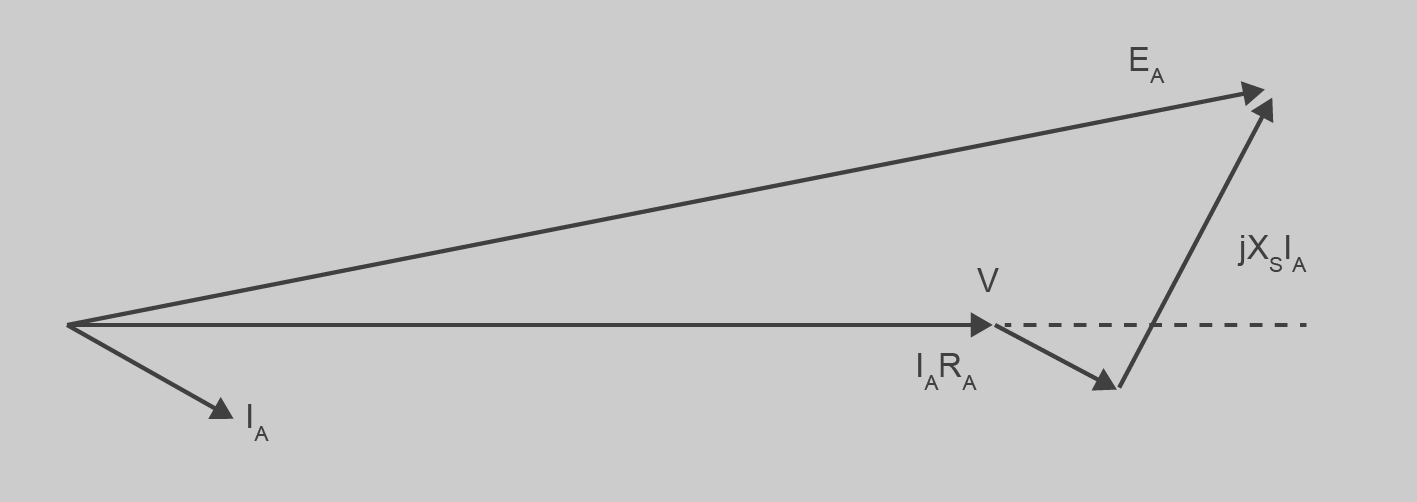
En augmentar la càrrega, com que la f.e.m. (EA) serà constant si el corrent d’excitació és constant, farà augmentar el corrent (I) i augmentarà la caiguda de tensió en la reactància síncrona (Xs), cosa que es tradueix en una reducció de la tensió de sortida (V). Podeu veure representat l’esquema simplificat de l’alternador asíncron en la figura.

Ara (EA) la podem variar, variant el corrent de camp en el bobinatge d’excitació; així controlem la tensió de sortida.
Independentment que la màquina síncrona actuï com a generador o com a motor, sempre que consumeixi potència reactiva (Q) es donarà que:

El cas del factor de potència avançat es mostra a la figura.
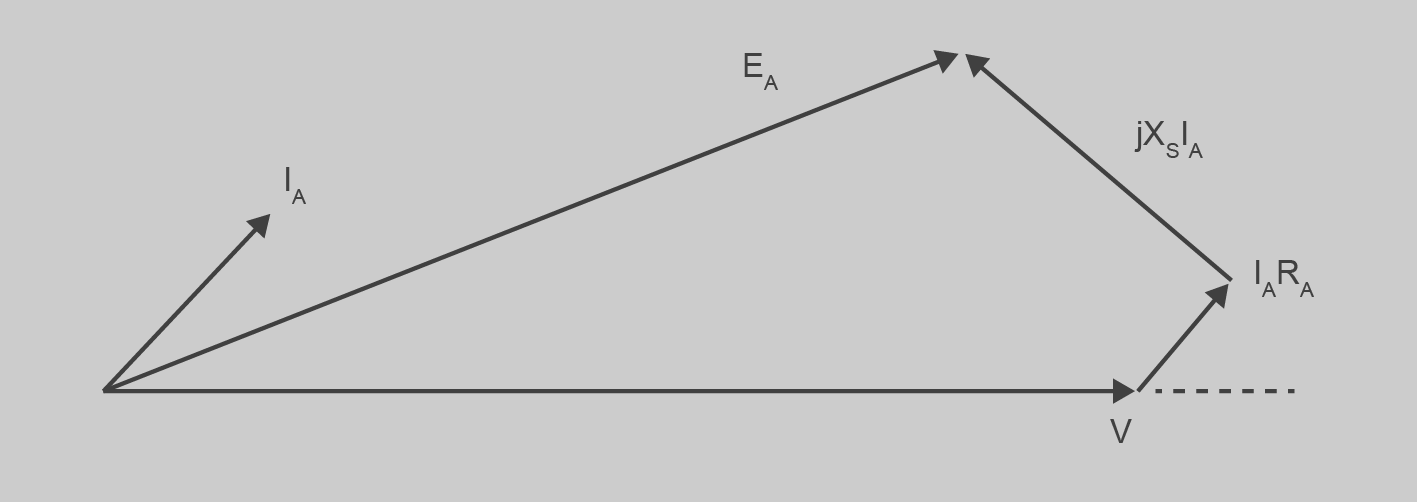
I una màquina síncrona lliura potència reactiva si:

I el seu diagrama està representat a la figura.
Circuit elèctric equivalent de l'alternador síncron
El circuit equivalent de l’alternador síncron es mostra a la figura.
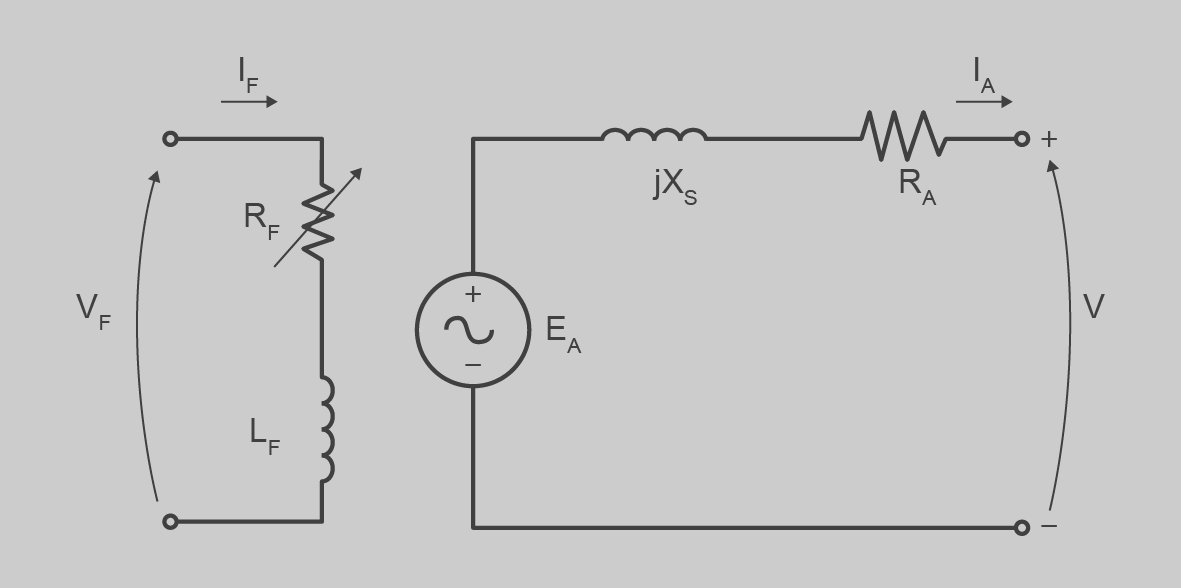
Els valors utilitzats al circuit equivalent per a un generador síncron es determinen en els assajos de buit, curtcircuit i mesura del corrent i tensió de camp, en què es determina la f. e. m. induïda en l’estator (EA), la reactància sincrònica (Xs) i la resistència de l’induït (RA).
Motors síncrons
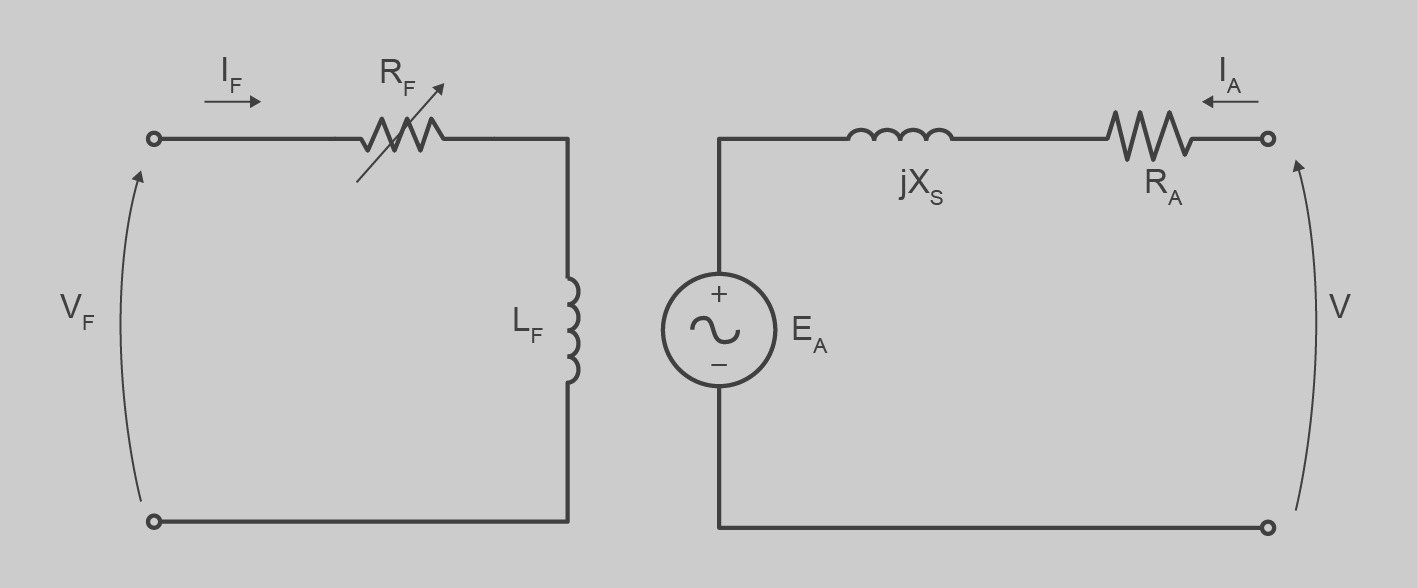
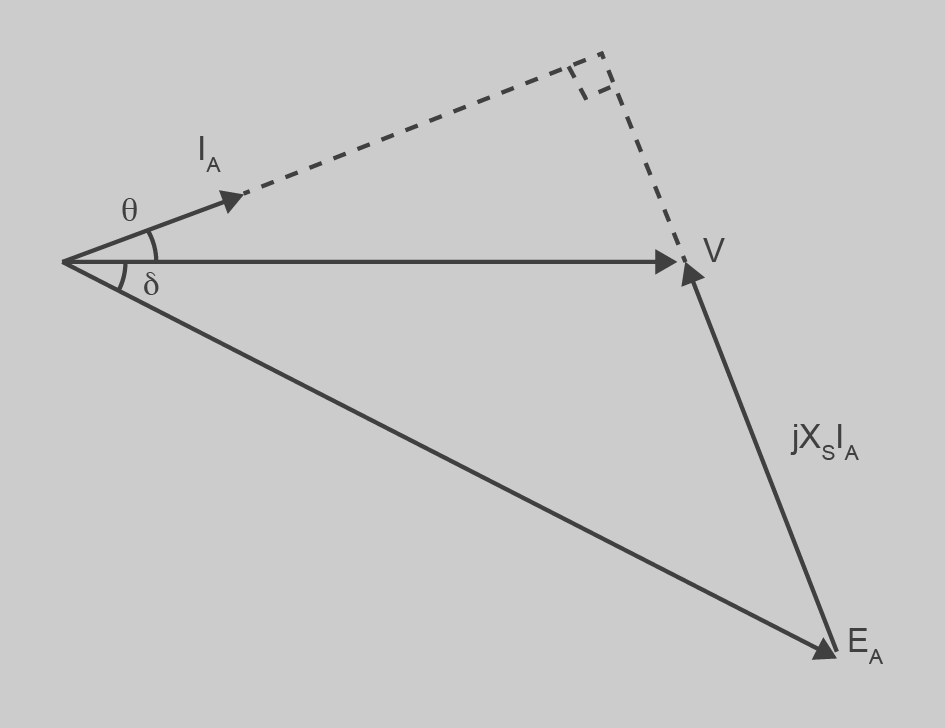
La màquina síncrona, com a motor es diu motor síncron. A les figures 32 i 33 en tenim l’esquema per fase i el diagrama vectorial.
La seva utilització és més restringida que els motors asíncrons; encara que s’utilitzen en qualitat de potents motors per a les instal·lacions de força que requereixen velocitat constant. També s’utilitzen aquests motors com a compensadors del factor de potència, ja que tenen la propietat de poder regular el cos φ, variant l’excitació, la qual cosa és rentable en grans instal·lacions, com centrals, o fàbriques com les de ciment, on veiem sovint motors sincrònics de velocitat constant en el moviment de les tremuges principals, i així s’aprofiten doblement, i eviten a més la despesa de condensadors addicionals.
En petites instal·lacions, no val la pena utilitzar motors síncrons per corregir el cos φ, i la correcció es fa per mitjà de condensadors. Els motors síncrons en petites potències s’utilitzen en servomecanismes i sistemes de control, sistemes de seguiment, posició, sincros, rellotges elèctrics, etc., atès que la seva propietat de mantenir la velocitat constant els fa idonis per a aquests objectius.
Incrementant el corrent de camp, el motor es comporta com una càrrega capacitiva.
Màquines asíncrones
En màquines asíncrones destaca la fabricació de motors sobre alternadors.
Les característiques diferencials són:
- Velocitat polar de l’estator (sincronisme) major que la velocitat de gir del rotor.
- Velocitat variable dins d’un marge.
- Autoregulació dins d’aquest marge.
Motor asíncron trifàsic
De màquines síncrones, en tenim alternadors i motors, i aquestes màquines són més utilitzades com a alternadors.
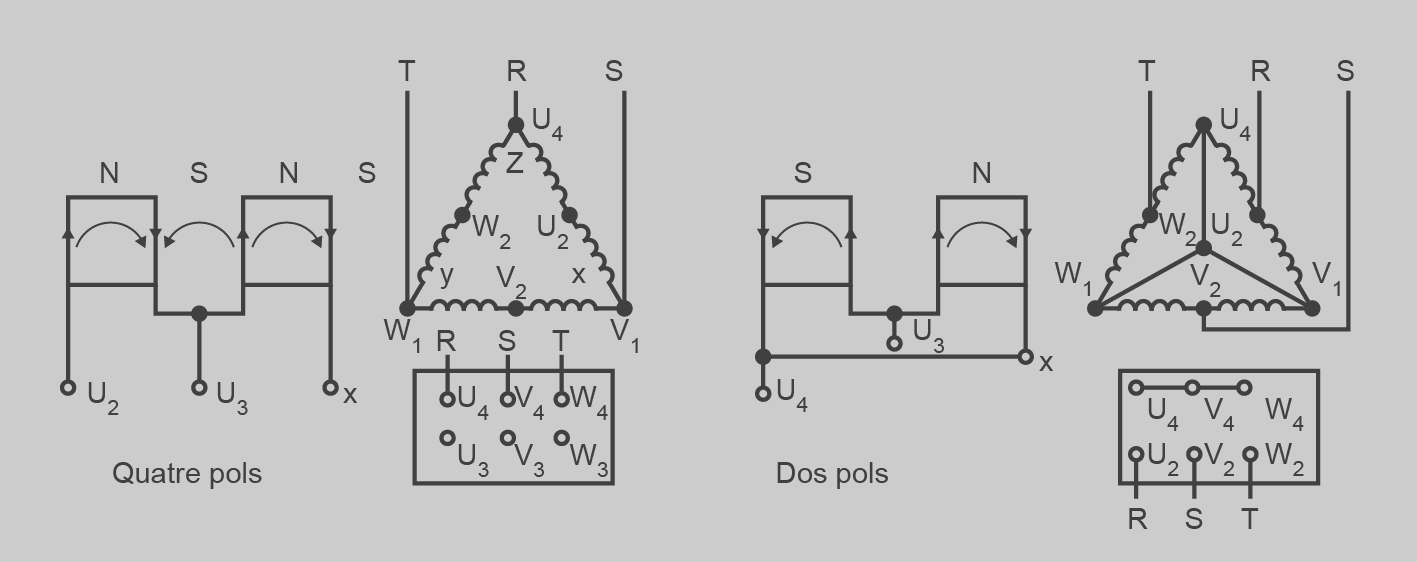
Les tipologies de les màquines trifàsiques d’inducció o asíncrones les tenim a la figura, i les seves representacions a la figura.
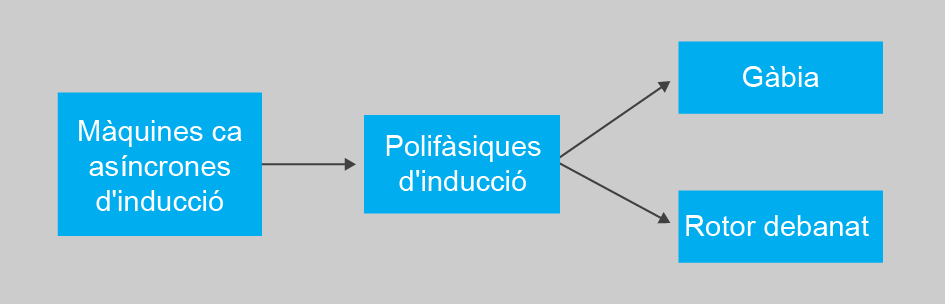
En la caixa de borns, els borns estan disposats de manera que es facilita l’operació d’efectuar la connexió en estrella o triangle segons la tensió de la xarxa que admetin els debanats (la màquina té dues tensions normals, la menor per al triangle i la major per a l’estrella).
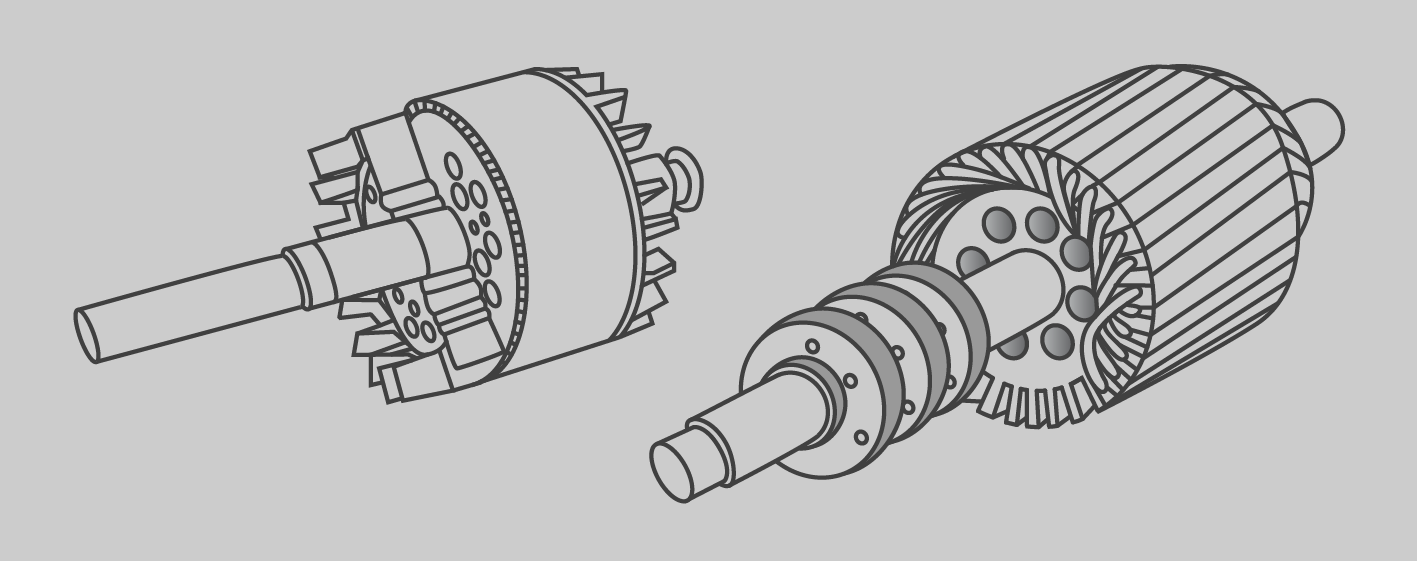
El rotor dels motors asíncrons es fabrica en dues varietats diferents, l’enrotllament en curtcircuit, anomenat també gàbia d’esquirol, i l’enrotllament debanat, anomenat també d’anells fregants (figura dreta).
En els rotors en curtcircuit o en la gàbia d’esquirol, hi ha un paquet magnètic amb ranures, similars a les de l’estator; en aquestes ranures es col·loquen barres de coure tancades en curtcircuit per mitjà de dos anells laterals. Aquest tipus s’adopta en motors de potència compresa entre 4 i 15 CV. En els motors de potència inferior a 4 CV, dels que s’utilitzen i fabriquen en grans sèries, la gàbia es fa d’alumini fos, de tal forma que els anells extrems constitueixin també les aletes del seu propi ventilador (figura esquerra). En fondre l’alumini, es construeixen d’una vegada les barres, els anells frontals i els dos ventiladors, i s’aconsegueix, d’aquesta manera, gran rapidesa en la fàbrica.
El nombre de ranures de l’estator i del rotor no ha de coincidir, per tal de disminuir al màxim les vibracions i els parells paràsits que poden originar inconvenients en el gir de motor, deguts a l’enfrontament entre ranures. A més, les ranures del rotor no segueixen la línia paral·lela a l’eix, sinó que estan lleugerament inclinades, ja que d’aquesta manera es millora l’estabilitat de la màquina.
El rotor amb anells lliscants consta d’un enrotllament trifàsic amb conductors aïllats connectats en estrella; els extrems lliures d’aquest enrotllament estan units amb els anells lliscants fixats a l’arbre del rotor; sobre els anells llisquen unes escombretes per mitjà de les quals l’enrotllament del rotor s’uneix amb un reòstat trifàsic. Aquesta disposició s’utilitza en motors de potència superior a uns 15 CV, i amb aquest procediment s’aconsegueix variar la resistència efectiva del rotor, cosa molt important per a la posada en marxa del motor.
En les ranures ubicades al costat interior de l’estator trifàsic es col·loquen tres debanats idèntics, desfasats 120° elèctrics, i a cada enrotllament trifàsic (entrades U, V, W i sortides, X, Y, Z) els corrents produeixen un camp magnètic giratori.
Es poden construir motors amb 2, 4, 6… i fins a 80.
Principi de funcionament del motor asincron trifàsic
La velocitat de sincronisme del camp magnètic inductor de l’estator en rpm compleix la general de màquines de CA:

en què:
- p = nombre de parells de pols
- f = freqüència
El parell o moment nominal Mn, és la força d’arrossegament del motor en els valors nominals, expressat en N·m, una força a una distància:

en què:
- Pn = potència nominal
Substituint el valor de la velocitat angular en rpm tenim:
I simplificant els valors constants:
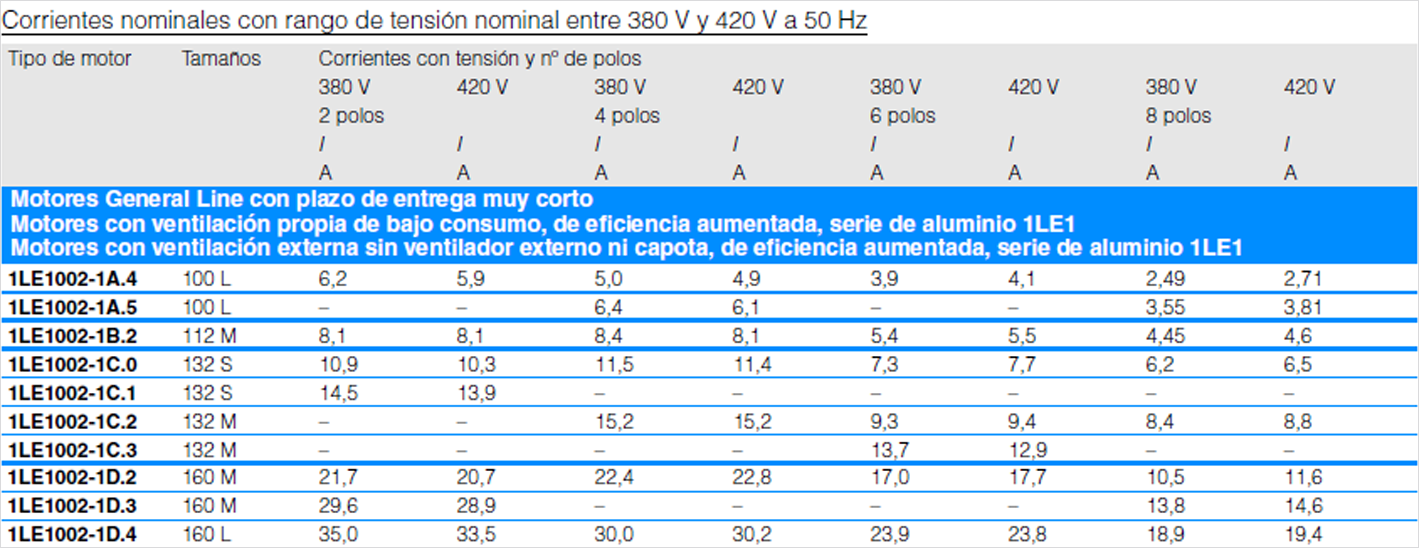
El parell i la potència estan lligats proporcionalment al consum de corrent, i podem veure a la figura part d’una taula comercial on consten aquests corrents en el motor asíncron a diferents tensions i nombre de pols.
Els corrents estatòrics produeixen un camp magnètic giratori de velocitat síncrona (nsinc, en rpm) que és directament proporcional a la freqüència f dels corrents de l’estator. Aquest camp estatòric actua sobre l’enrotllament del rotor, creant corrents induïts en el debanat rotòric. Els corrents induïts en el rotor també generen un altre camp magnètic giratori, i els camps es concatenen i obliguen el rotor a seguir el moviment.
El moviment del rotor s’efectua a una velocitat n en rpm, i per això la velocitat relativa de camp respecte del moviment del rotor serà nsinc - n rpm, de tal manera que com més pròxima sigui la velocitat del rotor respecte a la velocitat del camp giratori nsinc, es tindrà una velocitat de tall de flux del bobinatge del rotor inferior, i llavors la f. e. m. induïda en el rotor deguda al camp disminueix, i també es redueixen els corrents del rotor. La reducció dels corrents rotòrics disminueix el parell que actua sobre el bloc giratori, per la qual cosa el rotor ha de girar més lentament que el camp (n < nsinc); ha de girar asincrònicament.
Aquesta diferència de velocitats (nsinc − n) expressada en rpm s’anomena lliscament absolut.
El paràmetre s s’anomena lliscament relatiu i es mesura en %:

El quocient entre les velocitats ens dóna el lliscament unitari:

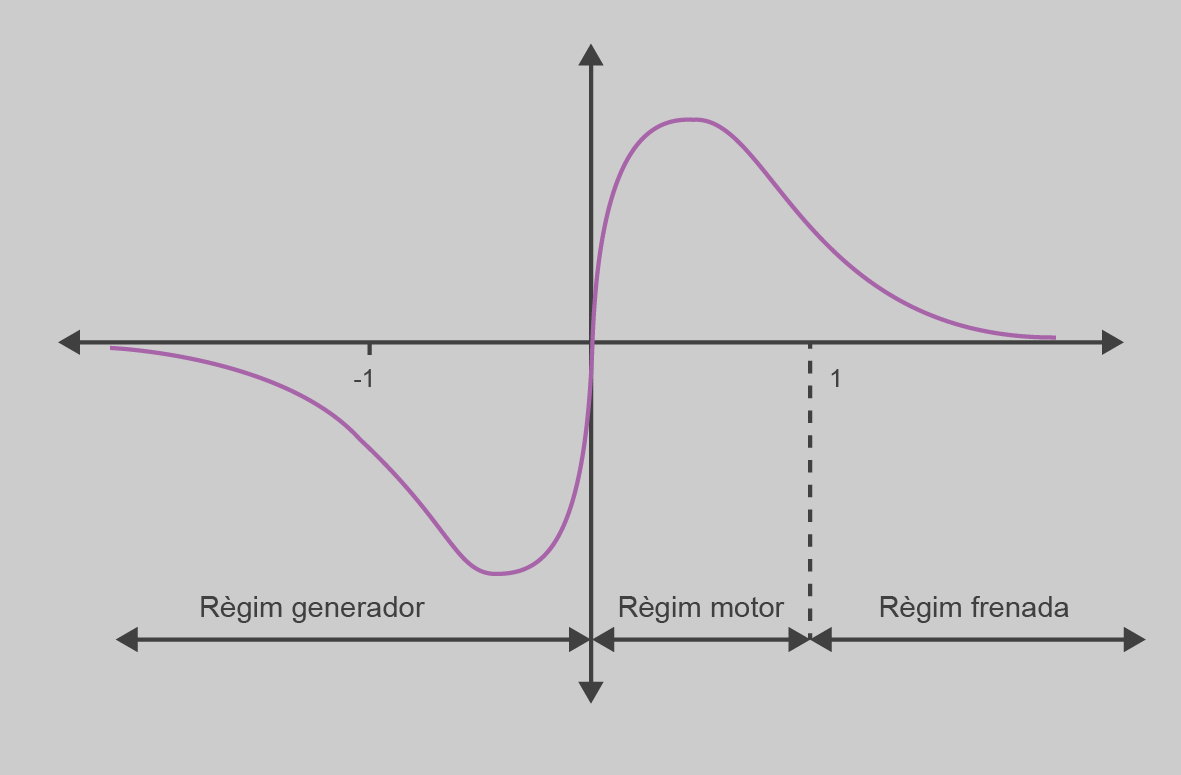
El valor del parell intern de la màquina (τi) deriva del valor de lliscament (s) a què està funcionant la màquina. Una gràfica de τi enfront de s resultaria com la figura.
La relació segons el lliscament unitari serà:
- Si s < 0 (1-s està aprox. 0%) la màquina està en règim de frenada; s’està aturant.
- Si 0 < s < 1 (1-s està entre el 1 i el 100%) la màquina treballa com a motor.
- Si s > 1 (1-s està a més del 100%) la màquina treballa com a generador.
Corbes característiques
Les corbes característiques d’una màquina relacionen entre si diferents magnituds i permeten analitzar el seu comportament en diferents règims de funcionament de manera precisa.
Per a la màquina asíncrona, les corbes característiques més importants són:
- Corba parell-velocitat
- Corba corrent-velocitat
- Característica de velocitat
- Característica de factor de potència
- Característica de rendiment
Parell motor i parell resistent
El terme parell motor és el mateix que parell intern, moment de rotació, moment induït o moment de torsió. La representació parell motor - intensitat en un motor asíncron trifàsic la veiem a la corba de la figura, i la relació de les corbes parell motor i parell resistent per trobar el punt optim les trobem a la corba de la figura.
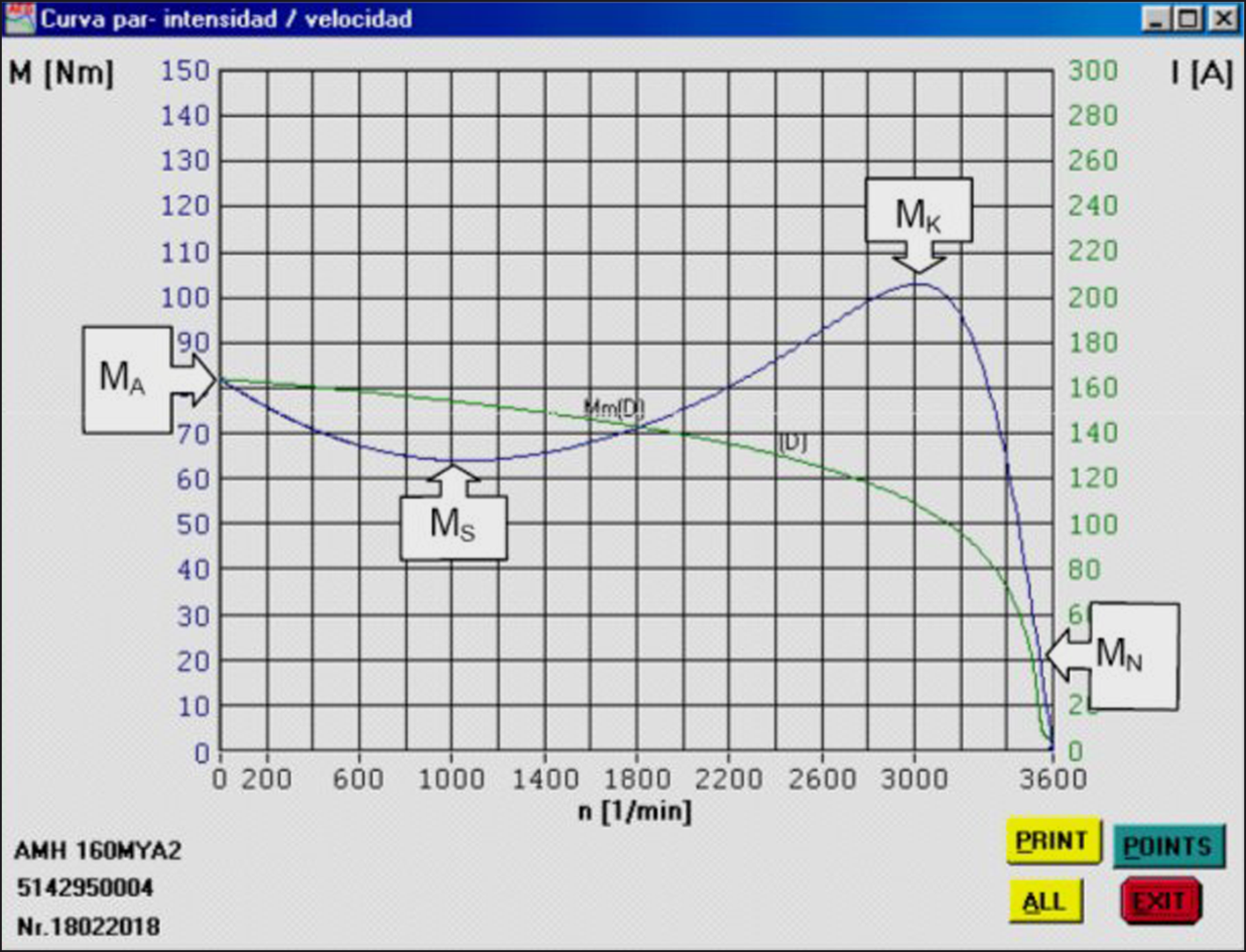
A la figura es pot apreciar el següent:
- MN: parell nominal o moment a plena càrrega (a la velocitat nominal).
- MK: parell màxim o moment de desacoblament (màxim en marxa); està situat entre 3 o 4 vegades el nominal.
- MA: parell d’arrencada (estàtic); està entre 2 i 3 vegades el nominal. Això implica que pot arrencar a plena càrrega.
- MS: parell de sotrac (mínim entre la parada i el màxim).
- MM: parell motor.
El parell motor és:

La zona del parell motor per sota del parell nominal s’anomena zona de baix lliscament. En aquesta zona la càrrega pot augmentar o disminuir entre el buit i el parell nominal, i dóna un comportament lineal a la velocitat (de sincronisme en buit i menor que el valor nominal) i al parell (0 en buit i fins al parell nominal). La reactància del rotor es menysprea i tenim un cos φ = 1. És la zona de comportament normal en estat estable del motor.
La zona del parell motor, entre el parell nominal i el parell màxim, s’anomena zona de lliscament moderat o alt. En aquesta zona la càrrega pot augmentar o disminuir entre el parell nominal sense sobrepassar el parell màxim (rotor aturat), i dóna a la velocitat i al parell un comportament lineal perquè el rotor balanceja l’augment del seu corrent amb la disminució del seu cos φ. Com més a prop del parell màxim, més lliscament i menys cos φ al rotor.
Si fem girar el rotor a més velocitat que la de sincronisme, el moment de torsió s’invertirà i el motor passarà a ser un generador.
Si canviem dues fases del motor canviarem el sentit dels camps magnètics i el moment induït que generi en sentit contrari el frenarà ràpidament; això s’anomena fre d’intercanvi de fase.
La capacitat de sobrecàrrega és:

El valor de Cs està comprés normalment entre 2 i 3.
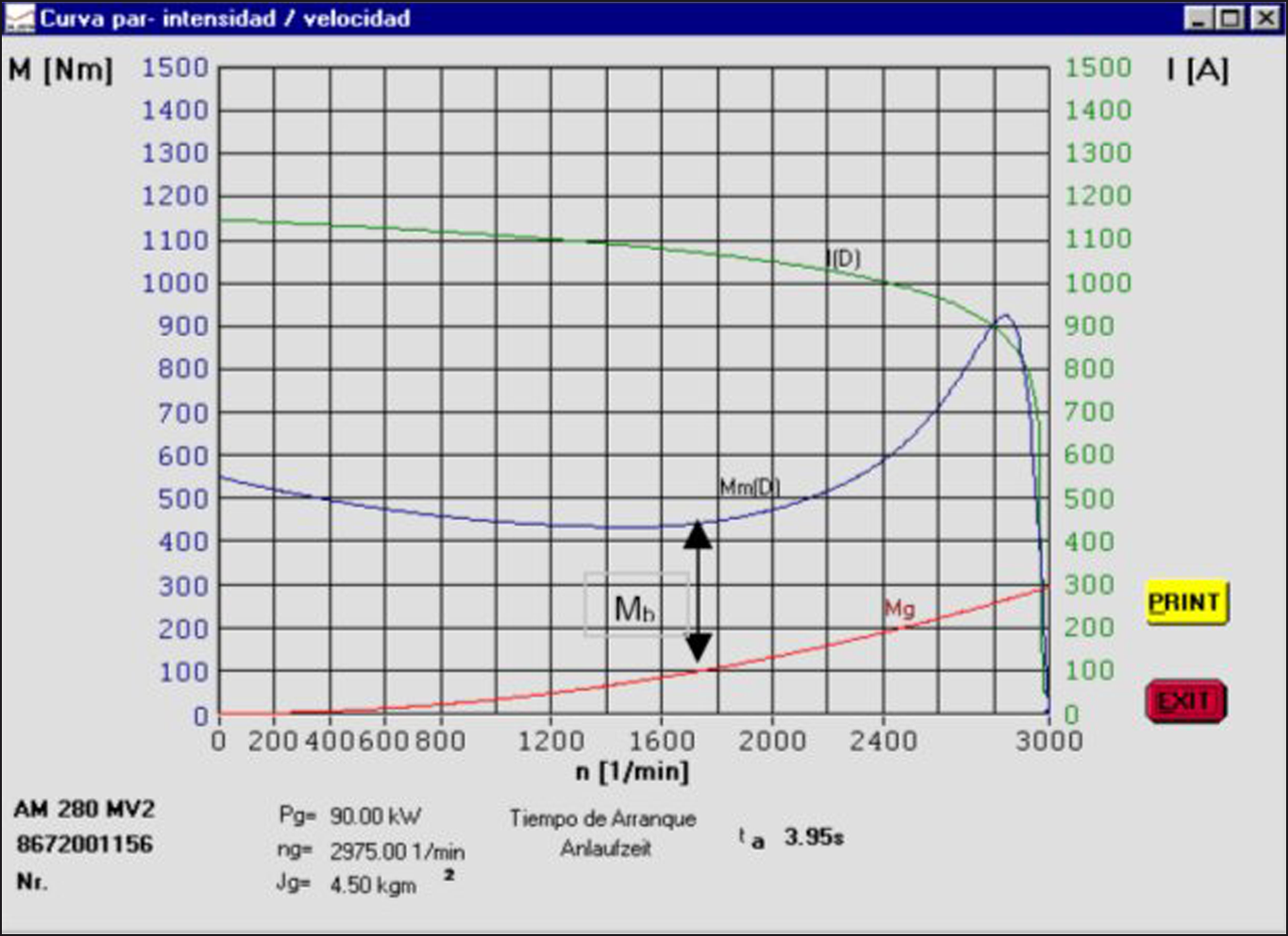
En la corba de la figura apreciem:
- Mb: parell d’acceleració, Mb = MM − Mg (fa que iniciï el gir la màquina)
- MM: parell motor
- Mg: parell resistent
En el moment que es troben la corba de Mg i la de MM s’estabilitza la velocitat a nominal.
En augmentar la càrrega mecànica del motor asíncron, el parell resistent del rotor es fa més gran que el parell de rotació i el lliscament (s) creix, mentre que la velocitat (n) disminueix. L’increment del lliscament provoca el creixement de la f. e. m. i dels corrents del rotor, gràcies a la qual cosa augmenta el parell de rotació i s’estableix l’equilibri dinàmic dels moments de rotació i resistent. D’aquesta manera l’augment de càrrega del motor asíncron provoca l’augment del seu lliscament.
El lliscament comprés en motors industrials entre el 3 i el 8% i augmenta o disminueix amb l’augment o disminució de la càrrega mecànica. Un augment de càrrega fa el parell resistent més gran que el parell intern, cosa que provocaria un augment de lliscament i de corrent al rotor; això produeix augment del parell motor fins que s’estableix l’equilibri dinàmic amb el moment resistent.
En la figura trobem l’esquema equivalent com a transformador del motor asíncron.

La potència trifàsica és:

en què:
- UL = tensió de línia
- IL = corrent de línia
- φ = l’angle de desfasament
- η = rendiment
Motor asíncron de pols commutables (motor Dahlander)
La velocitat dels motors asíncrons depèn de la freqüència de la xarxa de l’alimentació i del nombre de pols del debanat, i és sensiblement constant, encara que pot variar una mica amb la càrrega segons la característica mecànica.
Pot variar la velocitat amb el canvi del nombre de pols. Com més gran sigui el nombre de pols del debanat menor serà la velocitat de rotació.
La variació de la velocitat es fa amb diversos debanats trifàsics independents, amb diferent nombre de pols, o amb debanats especials de pols commutables anomenats Dahlander (amb relació de pols 2:1), mitjançant preses de connexió intermèdia en cada fase, segons la figura, amb debanat Dahlander de 2 i 4 pols.
La velocitat dels motors trifàsics asíncrons de rotor bobinat es pot regular variant la resistència d’un reòstat connectat als anells del bobinatge rotòric. L’augment de resistència intercalada en el debanat del rotor obliga a baixar la velocitat de gir del motor per a seguir movent la càrrega mecànica acoblada. Aquest sistema és poc utilitzat perquè disminueix el rendiment del motor per la pèrdua de potència del reòstat.
La velocitat es controla de manera molt completa amb el canvi de freqüència de la xarxa d’alimentació. S’utilitza un convertidor de freqüència associat a un sistema que ajusta la tensió, i la varia en el mateix sentit que la freqüència.
Camps d’aplicació dels motors asíncrons
Els camps d’aplicació dels motors asíncrons es determinen a la taula.
| Aplicació | Tipus 1 | Tipus 2 | Tipus 3 | Tipus 4 | Tipus 5 | Tipus 6 | Tipus 7 |
|---|---|---|---|---|---|---|---|
| Tipus de càrrega | Constant | Variable | Constant | Variable | Variable | Variable | Variable |
| Arrencades | Rarament | Rarament | Rarament | Rarament | Freqüents | Freqüents | Freqüents |
| Pics de càrrega | Baixos | Alts | Alts | Alts i freqüents | Alts i de curta durada | Alts | Alts |
| Parell d’arrencada | Normal | Normal | Normal | Normal | Normal | Normal a alt | Normal |
| Potència del sistema | Baixa | Baixa | Baixa | Baixa | Alta | Baixa | Molt alta |
Exemples d’aplicació de cadascun dels tipus són:
- Tipus 1. La majoria de les aplicacions: bombes centrífugues, ventiladors, compressors sense càrrega.
- Tipus 2. Màquines eina: torns, serres, fresadores, etc.
- Tipus 3. Compressors, bombes oscil·lants, transportadors carregats.
- Tipus 4. Premses punxadores d’alta velocitat.
- Tipus 5. Premses d’estirament, plegadores.
- Tipus 6. Grues, elevadors.
- Tipus 7. Extractors.
Aquests exemples de motors són alguns dels que requereixen una execució especial:
- Motors per a serveis intermitents emprats en mecanismes d’elevació, cabrestants, etc. Requereixen gran robustes mecànica.
- Motors per a telers. Tenen un funcionament cíclic ràpid, la marxa és irregular i ruda, i llavors el motor ha de ser excepcionalment robust.
- Motors per a l’accionament de la maquinària de coberta en els vaixells. L’ambient de treball és molt desfavorable, i s’ha de posar especial atenció en l’aïllament.
- Motors per a la indústria làctica. La carcassa ha de ser sense nervadures i recoberta d’un vernís especial que en faciliti la neteja.
- Motors destinats a funcionament sota l’aigua. Han de fer front al problema de funcionament en immersió.
- Motors per a servei en atmosferes inflamables o explosives. Són motors de seguretat augmentada, amb carcassa blindada per contenir les possibles explosions.
- Motors de diverses velocitats, per a aquells processos tecnològics que no requereixen una variació contínua de la velocitat, sinó únicament diversos nivells de velocitat diferents.
Alternador asíncron
En l’alternador induït fix es produeixen tres forces electromotrius desfasades entre si un terç de període en tres conductors separats entre si 120° elèctrics (1/3 de la distància entre pols del mateix nombre); en total l’induït d’un alternador té (p) parells de pols de 360° elèctrics, perquè en una volta de la roda polar passen sota un conductor p pols del mateix nombre.
En la pràctica, cada fase del debanat induït de l’alternador està format per diversos conductors que formen bobines, connectades de manera que se sumen les forces electromotrius engendrades en els conductors. El bobinatge de cada fase és obert (amb un principi i un final). Les fases han de ser idèntiques i desfasades entre si l’angle característic del sistema (120° elèctrics en el debanat trifàsic).
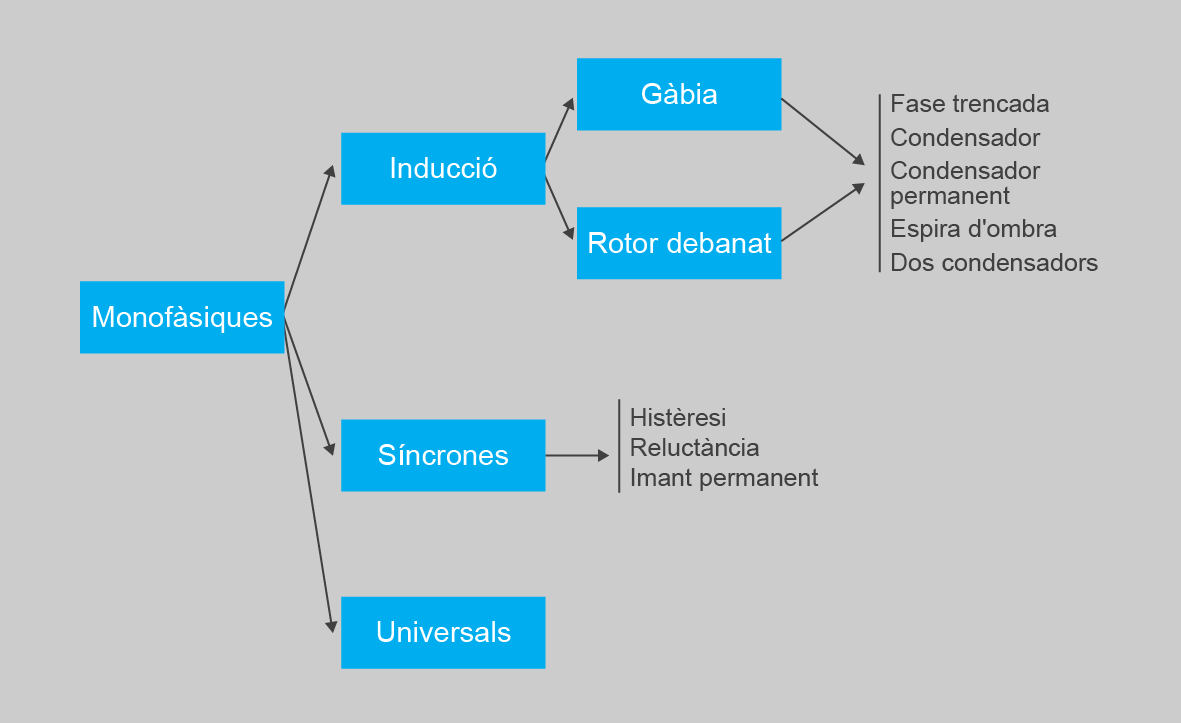
Màquines monofàsiques
Els motors monofàsics s’utilitzen en multitud d’electrodomèstics, i es classifiquen en els tipus següents:
- Motors amb debanat auxiliar
- Motors universals
Tant els síncrons com els asíncrons tenen debanat auxiliar, exceptuant el de bobina d’ombra que no en té, i pertany als asíncrons.
Un motor asíncron o d’inducció monofàsic consisteix en un debanat monofàsic muntat a l’estator i un debanat en una gàbia d’esquirol connectat al rotor. L’estator es connecta a la xarxa d’altern i es produeixen dos camps giratoris que giren a la mateixa velocitat però en sentit oposat; per això per a l’arrencada s’ha de buscar un parell addicional que faciliti la rotació i comenci a girar el motor. A la figura tenim la classificació de les màquines monofàsiques.
Màquines universals
Les màquines universals poden funcionar tant en CC com en CA; també anomenades monofàsiques en sèrie, tenen quantitat d’aplicacions, des d’una maquineta d’afaitar fins a una locomotora.
-

- El trepant portàtil és un exemple d’aplicació de motor universal.
Les parts principals del motor de les màquines universals són l’estator i el rotor amb col·lector.
Els bobinatges de l’estator i del rotor estan connectats en sèrie a través d’unes escombretes. El parell d’arrencada se situa en 2 o 3 vegades el parell normal. La velocitat canvia segons la càrrega. Quan augmenta el parell motor disminueix la velocitat.
Se solen construir per a velocitats de 3.000 a 8.000 rpm, i en podem trobar per a 2.000 rpm. Per poder variar la velocitat necessitem variar la tensió d’alimentació, cosa que normalment es fa amb un reòstat o resistència variable.
La figura en mostra un esquema.
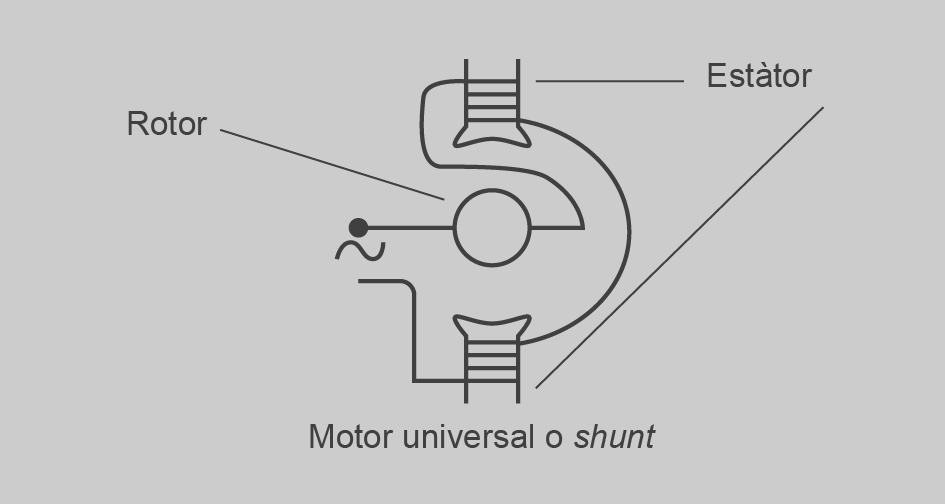
El canvi de gir és controlable, i només hem d’intercanviar una fase en l’estator o en el rotor (mai en tots dos); això ho farem en la caixa de borns o connexions.
Quan el motor és alimentat, es produeixen corrents que circulen en el mateix sentit, tant a l’estator com al rotor, però en el canvi de cicle canvia el sentit en tots dos, i això provoca l’arrencada del motor. S’utilitzen on es requereix gran velocitat amb càrregues febles.
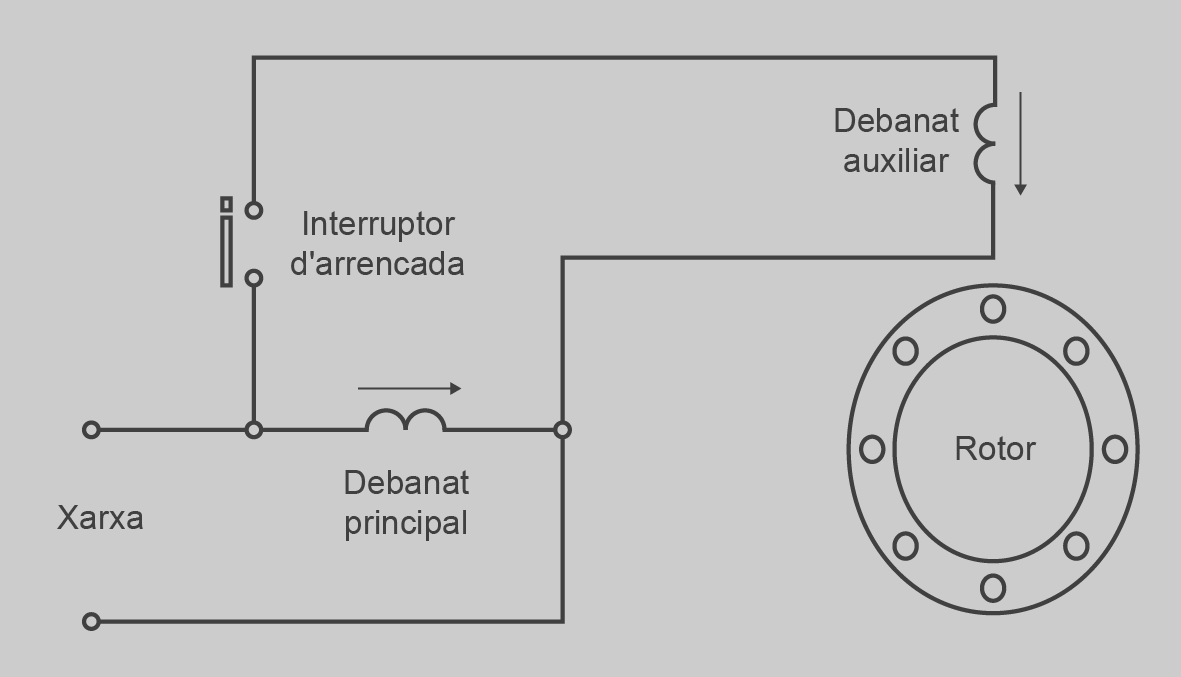
Motor monofàsic de fase trencada
El motor monofàsic de fase trencada consta de dos bobinatges independents a l’estator:
- Bobinatge de treball.
- Bobinatge auxiliar, normalment d’alta resistència i baixa reactància; està desplaçat 90° elèctrics i serveix per arrencar el motor.
Per la diferència de reactàncies dels debanats els corrents van desfasats gairebé 90°, i produiran un camp giratori (com si es tractés d’un sistema bifàsic). Tots dos bobinatges es connecten directament a la xarxa, però com l’auxiliar no es dissenya per a servei continu, un cop que la màquina arrenca, un interruptor centrífug treu el debanat auxiliar fora de servei, de manera que el motor queda girant en el sentit de l’arrencada, encara que ara hi ha un camp monofàsic. És un motor amb parell d’arrencada moderat, utilitzat en rentadores, ventiladors, petites bombes centrífugues, mescladores… A la figura podeu veure el debanat de fase trencada.
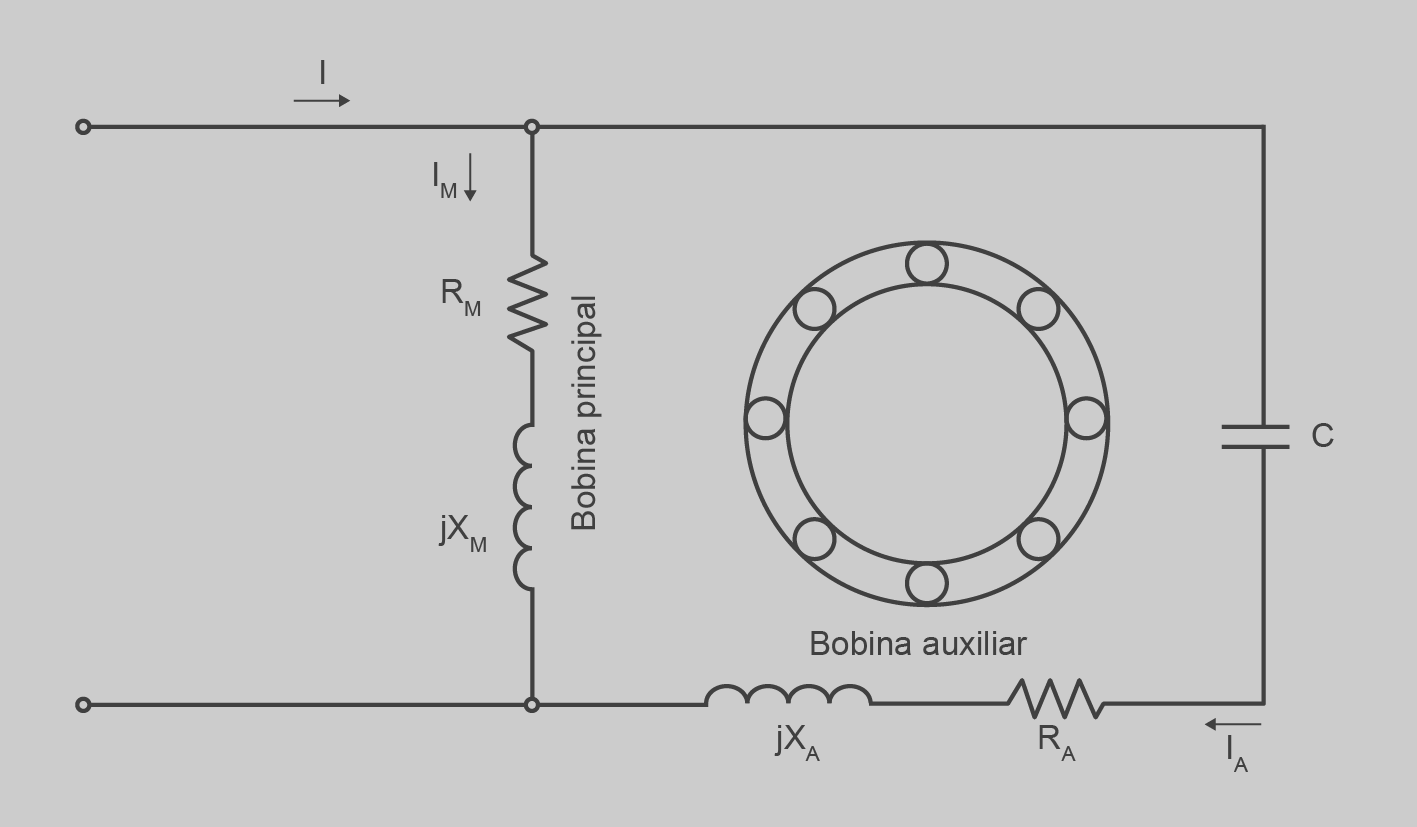
Motor monofàsic de condensador
Si al motor de fase trencada li afegim un condensador electrolític, connectat en sèrie amb el bobinatge d’arrencada (figura), s’aconsegueixen parells d’arrencada 3,5 vegades per sobre del parell nominal. El rendiment i el factor de potència seran també elevats.
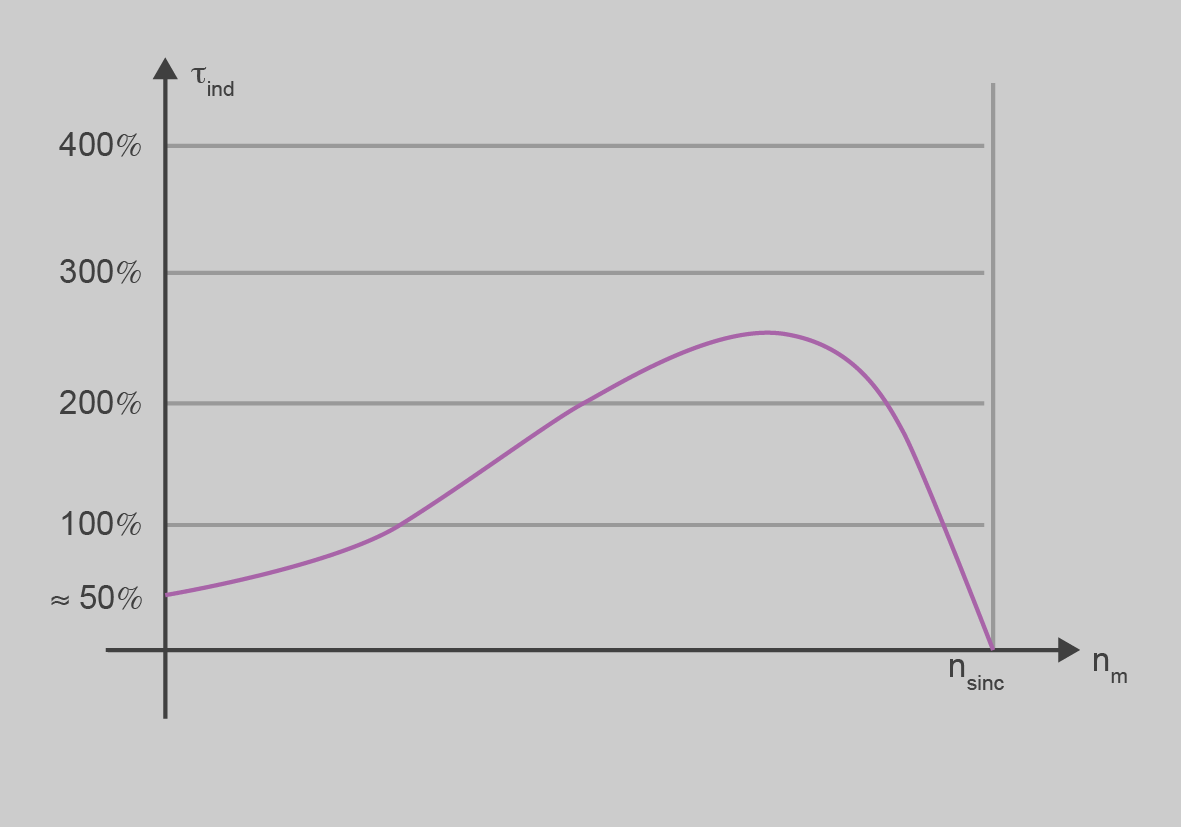
Aquests motors s’utilitzen com a petites bombes de pistó, compressors d’èmbol, cambres de refrigeració, molinets de cafè, màquines eina… A la figura teniu la corba parell induït - velocitat del motor amb condensador.
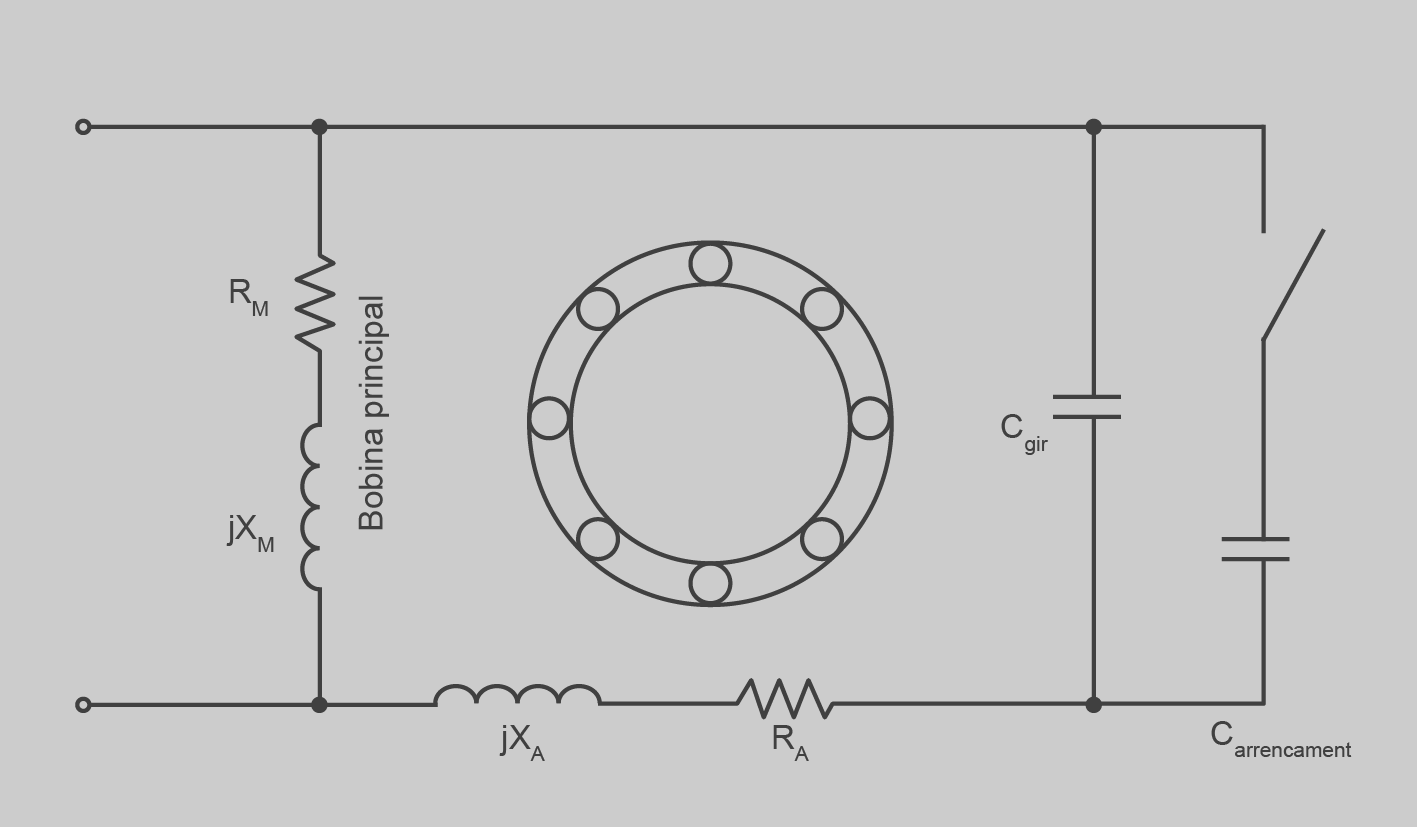
Motor monofàsic de condensador permanent
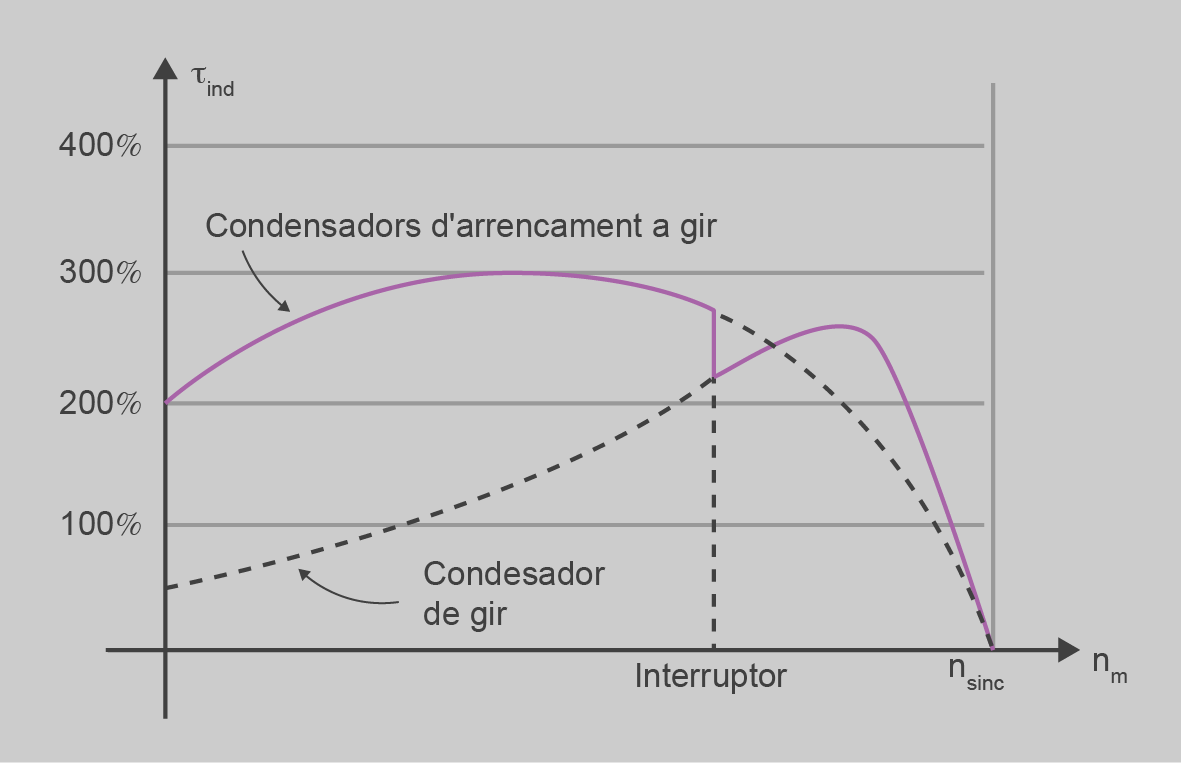
El motor monofàsic amb condensador permanent i la seva corba parell-velocitat els trobem, respectivament, a les figures 47 i 48. Es tracta de mantenir el condensador constantment perquè el gir sigui uniforme; no necessiten interruptor centrifug, són més eficients, amb un moment de torsió més uniforme i més factor de potència que els d’inducció monofàsics, però tenen menys moment d’arrencada que el de condensador.
Hi ha motors que porten dos condensadors: un d’arrencada, que queda desconnectat pel centrífug, i un altre per a quan es desconnecta el d’arrencada, anomenats motor amb condensador d’arrencada i gir; el condensador d’arrencada sol ser entre el 10 i el 20% del condensador de gir. Si canviem les connexions al bobinatge auxiliar canvia el sentit de gir del rotor.
Motor monofàsic amb espira d’ombra o de pols ombrejats
El motor monofàsic amb espira d’ombra és el representat a la figura.
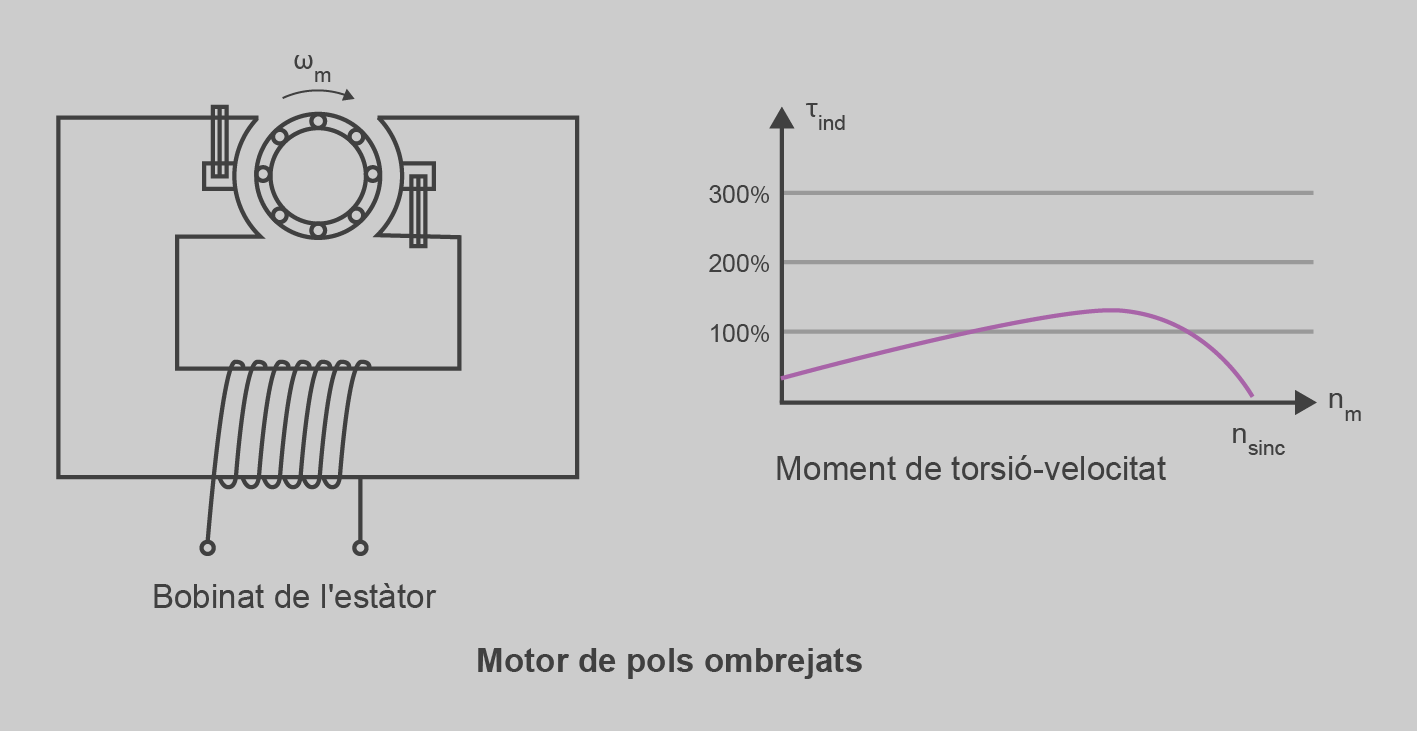
Aquest tipus de motor és el més econòmic de fabricar, però al mateix temps no arrossega pràcticament càrrega, i la seva utilització és molt limitada.
Motor monofàsic d’histèresi
El motor monofàsic d’histèresi té un rotor de material ferromagnètic sense sortints ni bobines; és la histèresi la que provoca un camp magnètic que es concatena amb el de l’estator i arrossega el motor.
El parell de torsió serà més gran com més histèresi proporcioni el material del rotor; es comporta com el lliscament en els motors d’inducció. Els rellotges tenen aquest motor amb autoarrencada d’espira d’ombra.
Motor monofàsic de reluctància
En els motors monofàsics de reluctància, el moment de torsió es presenta quan s’introdueix un objecte de ferro, per exemple, i per reluctància genera un altre camp que es concatena amb el de l’estator; el model podria arrencar per si mateix amb un rotor de gàbia o amortidors.
Una variació és el Syncrospede, fabricat als EUA, que introdueix unes guies al rotor per augmentar l’acoblament entre cares polars adjacents. Augmenta en un 150% el moment de torsió màxim, i dóna una mica més de moment de torsió nominal que un motor de reluctància convencional.
Motor monofàsic d’imant permanent o pas a pas
El motor monofàsic pas a pas és un tipus especial de motor síncron; el teniu representat a la figura, i amb un esquema de tensions de control a la figura.
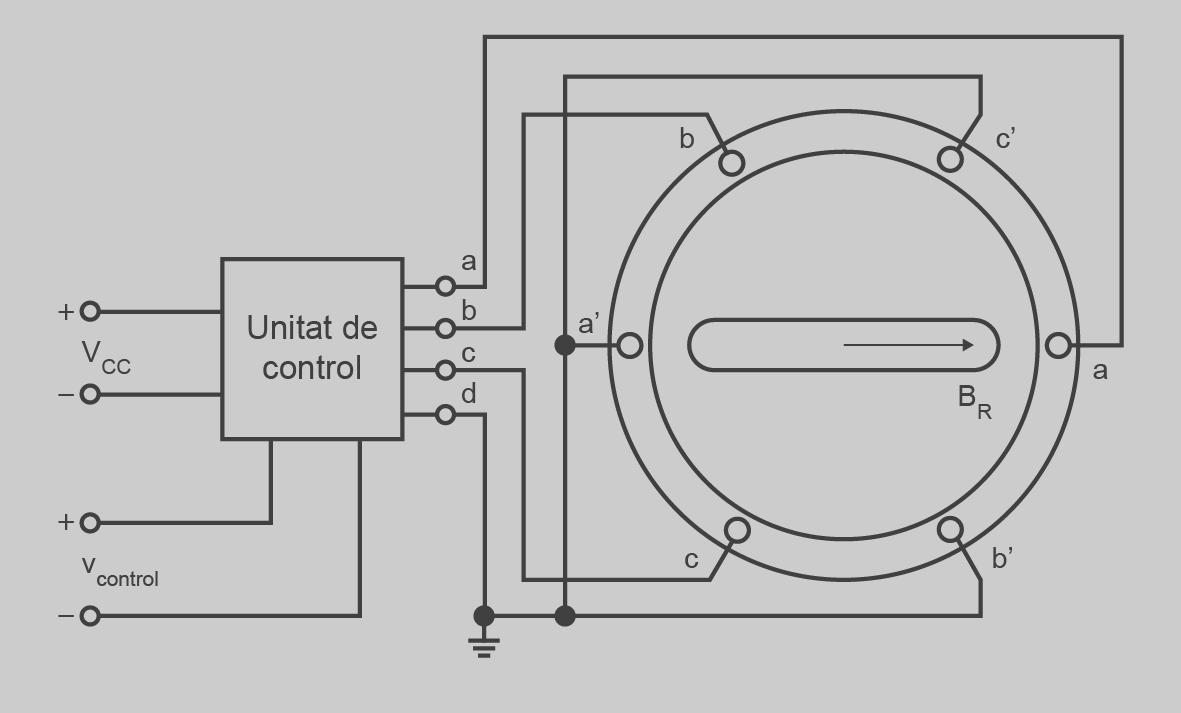
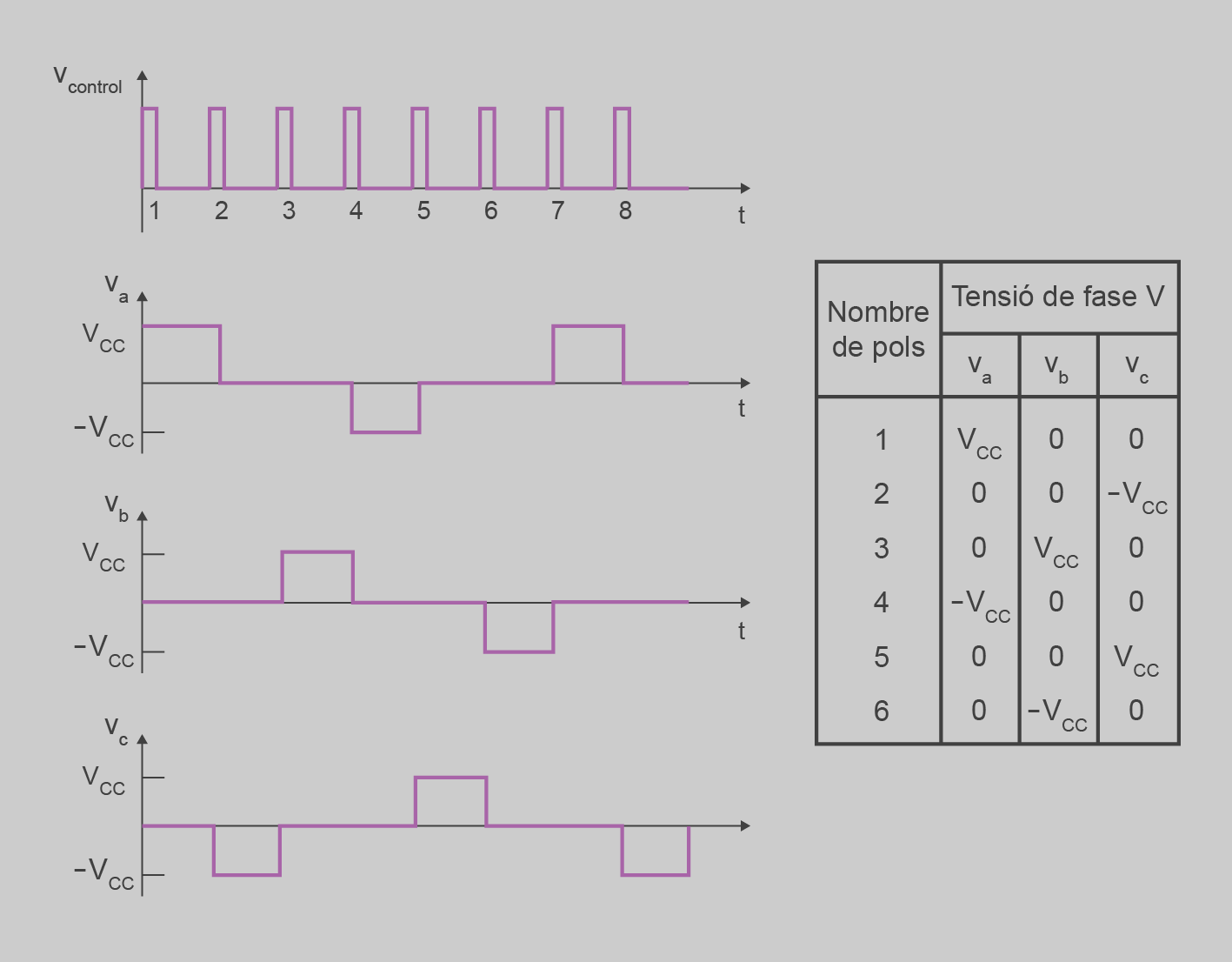
El motor pas a pas rota un determinat angle a cada impuls elèctric. Els passos habituals són 7,5° o 15°, i són motors molt utilitzats en sistemes de control, ja que l’eix es pot controlar de manera precisa.
Cada vegada que només s’apliqui tensió al bobinatge a, b o c el rotor girarà 120°, i a més podem canviar la polaritat als bobinatges, de manera que ja el farem girar 60°; si augmentem el nombre de pols a 8 pols ja tindrem el motor pas a pas amb una variació de 15°.
Documentació tècnica de màquines elèctriques rotatives de corrent altern
L’ús de motors actualment és molt divers; podríem estar parlant de motors de joguines o motors perforadors com els que fan les excavacions dels túnels del metro.
Penseu on s’utilitzen motors de kW actualment: qui els instal·la i en porta el manteniment. Estem parlant de cintes transportadores, bombes impulsores… Tenim una connotació d’entorn industrial, on l’electricista industrial tindrà unes necessitats d’informació diferents si està en el procés de disseny, en el procés de fabricació, en el procés de muntatge o en el procés de manteniment o revisió. Per tant, l’elaboració tècnica de documentació haurà de ser diferent:
- Entrada de matèria primera. Albarans de recepció.
- Disseny. Càlcul i modelatge.
- Fabricació. Fulls de seguiment de les etapes.
- Assajos de verificació de qualitat. Programari tècnic.
- Emmagatzematge. Llista d’estoc.
- Expedicions i servei postvenda. Manuals d’instal·lació i funcionament, normes de seguretat, garanties, certificacions de qualitat, revisions i manteniment.
- Manteniment. Pla de manteniment, full d’avaries i reparacions.
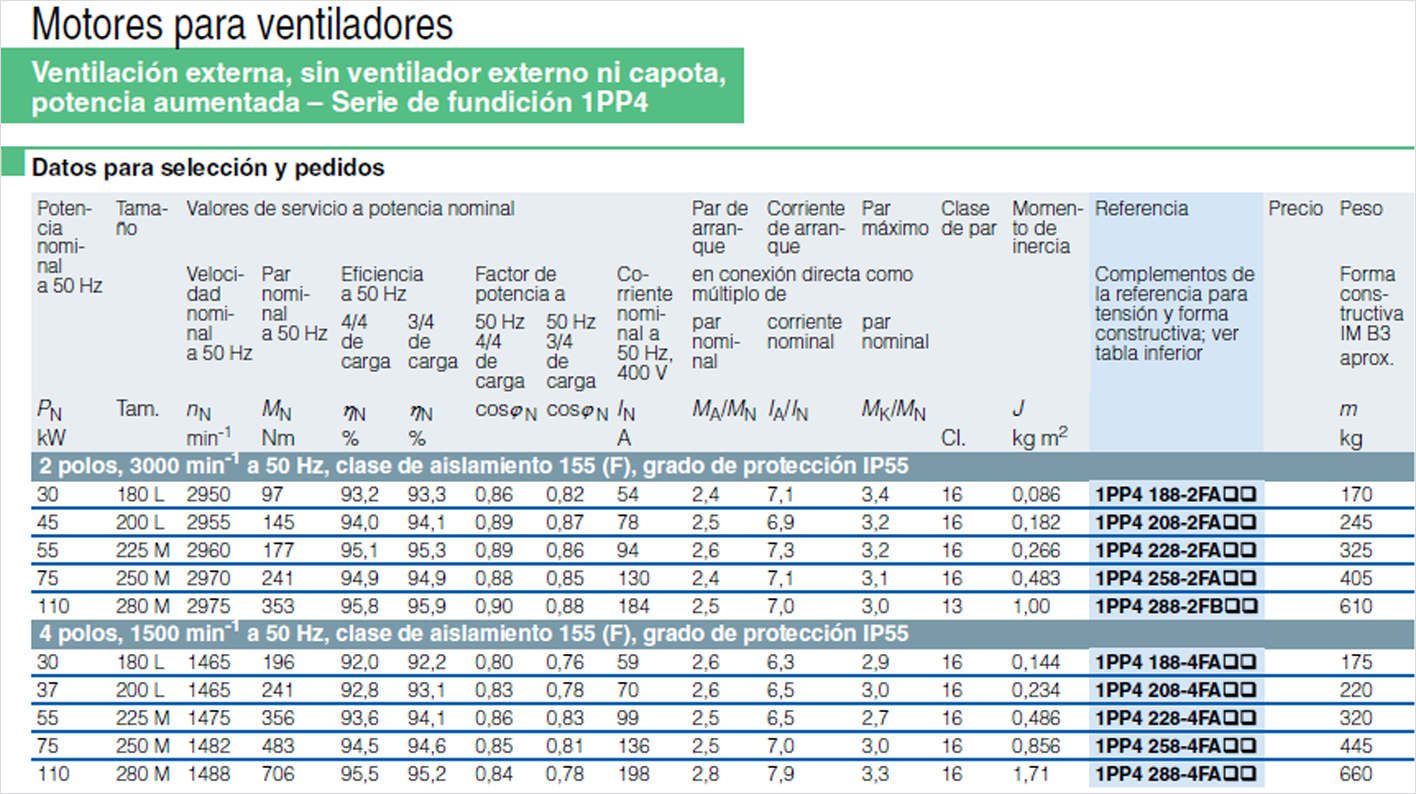
A la figura hi ha un fragment d’una taula comercial on teniu les característiques per a motors de ventiladors.
Aplicació de programari de dibuix tècnic i càlcul d'instal·lacions
Matlab
El Matlab és un programa de càlcul matemàtic molt avançat i complet, que pot fer càlculs de tot tipus, des de matrius i integrals fins a processos industrials de tota mena.
La singularitat dels programes tècnics estarà d’acord amb la part del procés que estiguem efectuant:
- El programari de disseny correspondrà més a un Matlab.
- Des del punt de vista de modelatge, esquema de fabricació i mesures, a la tipologia d’un AutoCAD.
- Si estem en el procés de muntatge o volem una presentació més adequada d’un quadrista o un muntador industrial, estaríem parlant d’un Elcad, per exemple.
- Les bases de dades funcionen en la recepció de matèries primeres, estoc, vendes…
- Un programa de tractament de textos per fer els manuals de funcionament, de manteniment…
- El Psim és un programa semblant al Pspice en què es poden simular i visualitzar gràfiques de magnituds característiques en el temps; serveix tant per entendre el funcionament o per a proves i assajos complicats.
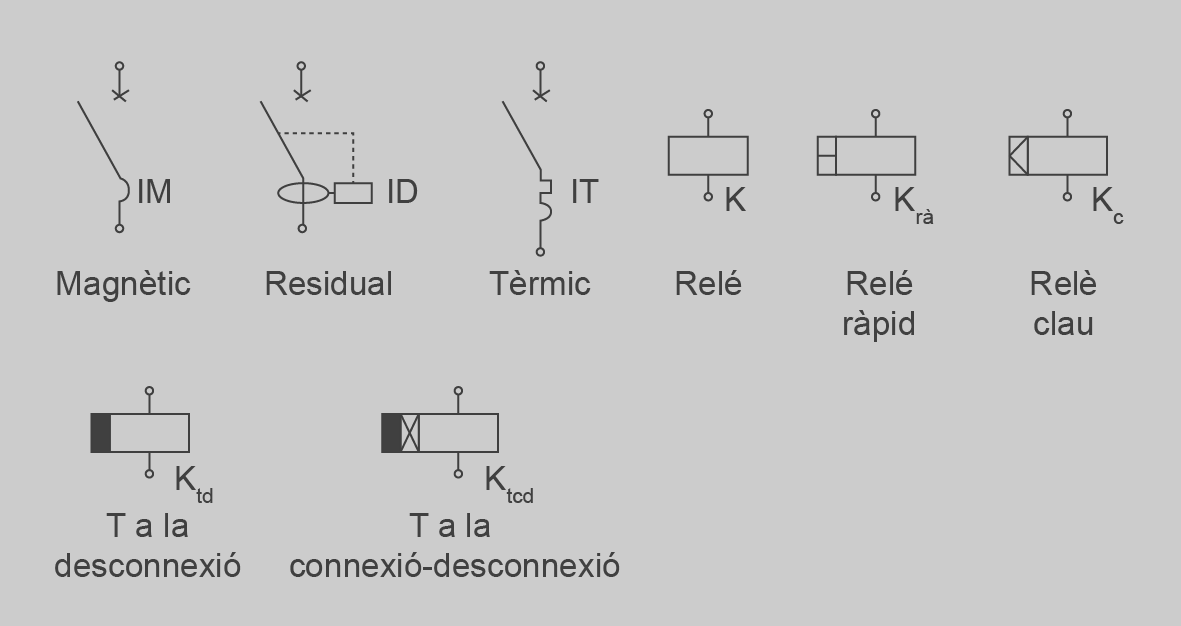
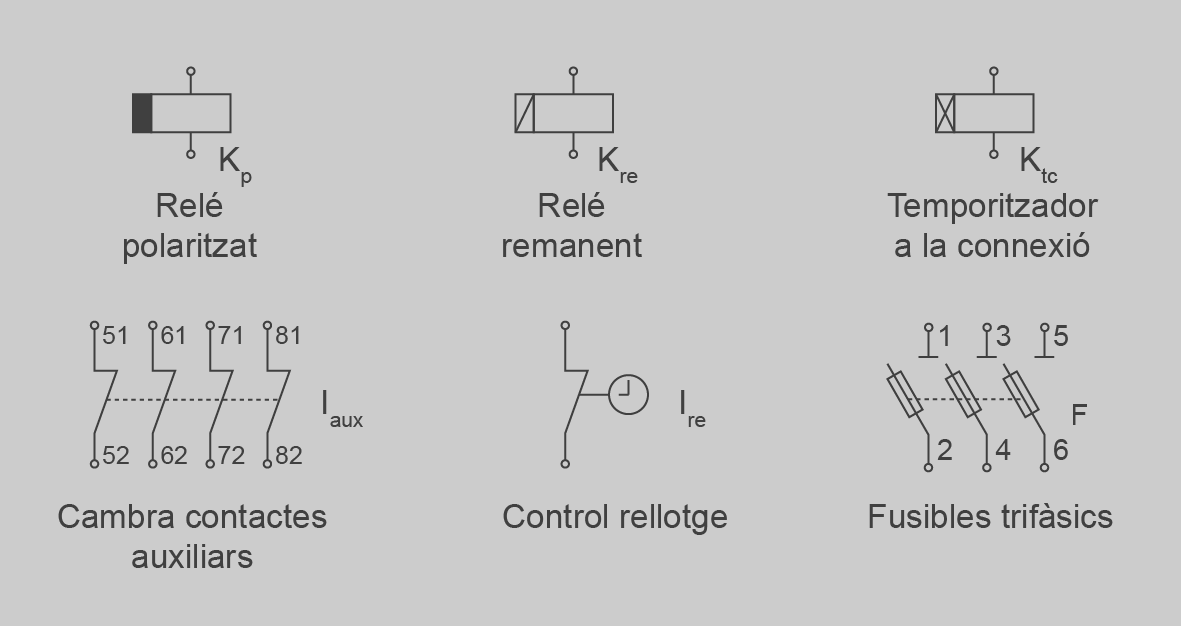
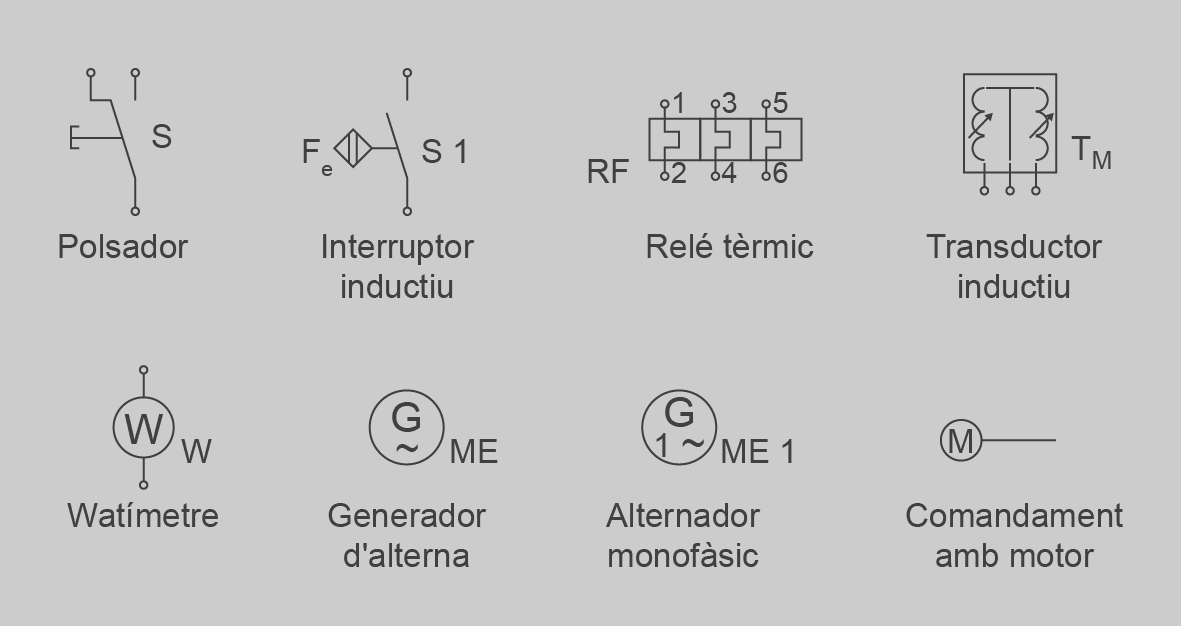
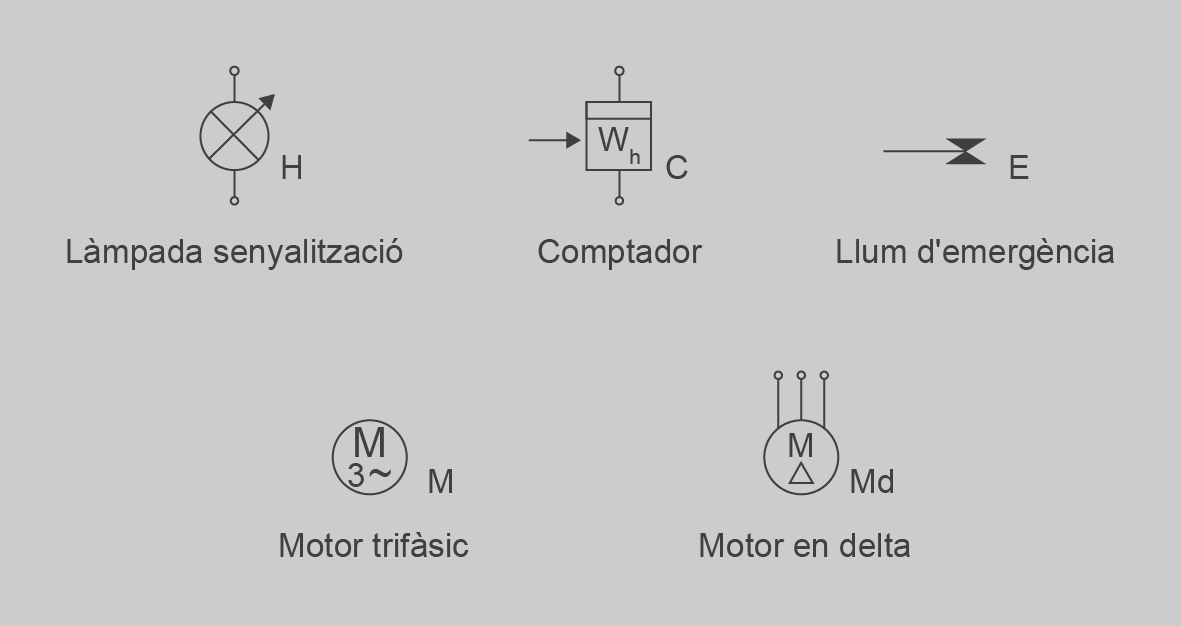
Simbologia normalitzada i convencionalismes en la representació
La simbologia normalitzada s’utilitza en esquemes d’automatismes, instal·lacions, i altres aplicacions, i amb la majoria de programes de representació actuals de dibuix es poden tenir els símbols desats, per a quan es necessiti utilitzar-los, fent la crida al símbol desat i enganxant-lo en el lloc adequat de l’esquema que s’està confeccionant.
Per exemple, es poden fer els símbols amb l’AutoCAD i posteriorment inserir-los com a blocs. A la figura, figura, figura i figura podeu veure símbols utilitzables amb l’AutoCAD i altres progames, amb les seves designacions.
Plànols i esquemes normalitzats
En terminologia elèctrica els esquemes responen a tres necessitats:
- Com funciona?
- Com es connecta?
- On es col·loca?
En les representacions elèctriques de muntatge d’instal·lacions és molt habitual sentir parlar d’esquemes:
- Funcionals
- Multifilars
- Unifilars
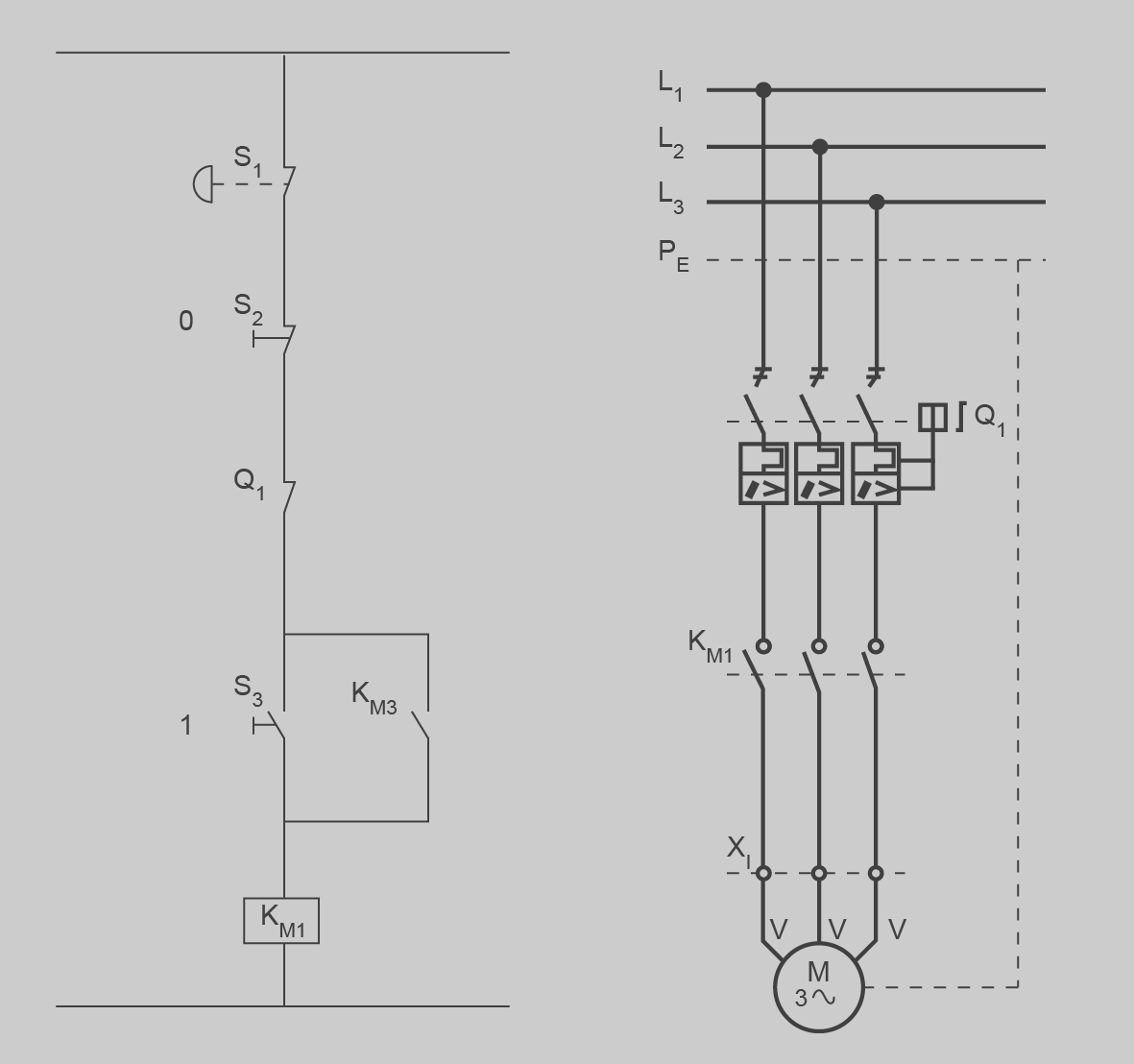
Quan la dificultat de la connexió creix, ja necessitem una representació amb més cura de la importància de les connexions; aquesta tipologia de connexions, que pertany més a l’ocupació de quadrista o electricista industrial, té dos esquemes diferenciats, que responen a la pregunta de com funciona:
- El de control o maniobra
- El de potència o treball
Aquests esquemes es complementen amb esquemes addicionals:
- De connexions d’armaris
- Unifilars
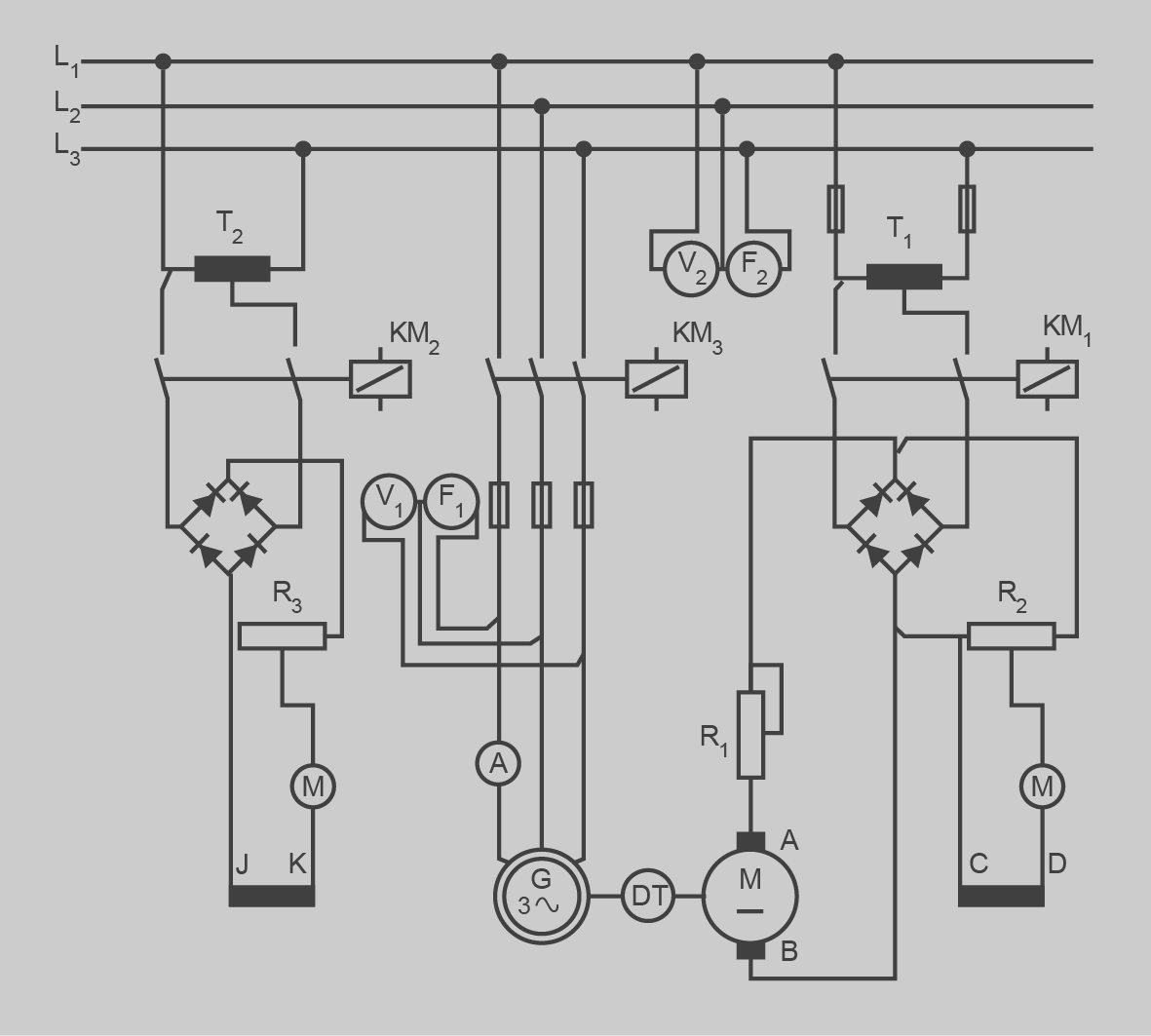
A la figura tenim una marxa-aturada d’un motor trifàsic, i a la figura, un generador trifàsic arrossegat pel seu motor de continu.